点云编辑模块

点云导入格式: obj, asc, las, ply, xyz, ptx, pcd, gbg, gtg(有序点云格式)
有序点云格式gbg(二进制格式,导入导出速度快),gtg(文本格式)
采样:点云点索引采样,与简化不同的是,采样不会改变点云坐标。
均匀(支持有序点云):均匀采样点云,可以设置目标点数。注意,采的是点云点索引,不会改变点云坐标。
几何(支持有序点云):根据点云几何进行采样,曲率越大的地方采样点数越多
 颜色(支持有序点云):根据点云颜色进行采样,色差越大的地方采样点数越多
格栅(支持有序点云):根据点间距把空间分为一个一个的格子,每个格子采样一个点,并且使得采样的点云尽量均匀。参数为点间距。和均匀采样相比,它的速度更快,但是均匀性稍低。
有序:把无序点云转化为有序点云,参数为点距。
几何对齐:该方法在原始点云上进行几何感知采样,使采样点能够遵循模型的几何走向分布。算法需要两个关键参数:目标点距和点邻居个数。其中,点邻居个数用于为每个点构造局部邻域,以分析其几何特征;该值通常不小于9。若点云分布不均匀,则建议适当提高此参数(如增至16或25),以确保计算的准确性。
颜色(支持有序点云):根据点云颜色进行采样,色差越大的地方采样点数越多
格栅(支持有序点云):根据点间距把空间分为一个一个的格子,每个格子采样一个点,并且使得采样的点云尽量均匀。参数为点间距。和均匀采样相比,它的速度更快,但是均匀性稍低。
有序:把无序点云转化为有序点云,参数为点距。
几何对齐:该方法在原始点云上进行几何感知采样,使采样点能够遵循模型的几何走向分布。算法需要两个关键参数:目标点距和点邻居个数。其中,点邻居个数用于为每个点构造局部邻域,以分析其几何特征;该值通常不小于9。若点云分布不均匀,则建议适当提高此参数(如增至16或25),以确保计算的准确性。
简化(支持有序点云):与点云采样不同的是,点云简化会改变点云的坐标。它不是采样索引,是把距离近的点合并成一个点。
第一种简化:参数意义为空间分辨率,范围[1, 10000],简化后点云内部点距=(点云包围盒 / 分辨率),距离很近的点会融合为一个点。
第二种简化:参数意义为点间距。

法线 点云法线广泛应用于三维数据处理的各个地方,如点云三角化,点云渲染等。它包含两个方面:法线的计算和法线的定向。
Front(支持有序点云):计算深度点云(扫描仪初始采集到的点云,相机坐标系下)的法线,法线定向为Z轴正方向。扫描的深度点云的法线可以完美定向,因为法线是朝相机方向的。
计算(支持有序点云):如果点云不是深度点云,或者点云进行了刚体变换,法线不再统一的朝向相机。则它的法线定向可以通过算法计算得到。需要说明的是,目前还没有一种可以完美定向法线的计算方法,因为有些数据有歧义性。一般的情况下,Geometry++的法线定向是很准的。
反向:反转点云法向量方向
修复:鼠标右键单击需要反转法线方向的局部点片
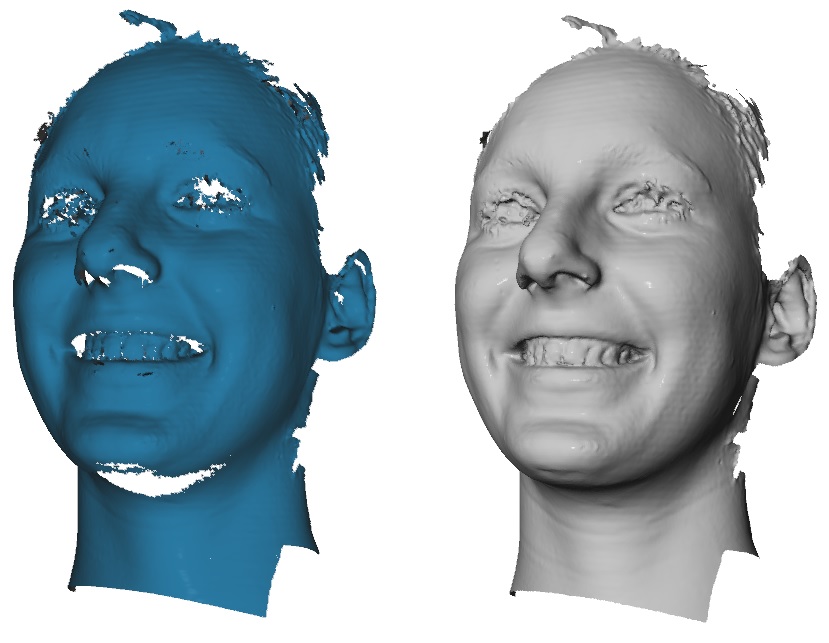
更新:重新计算法线,法线定向与原始定向一致。这个功能一般用于多帧点云融合成一个点云后,需要重新计算法线,但是同时要保持原有的法线定向。参数Sharp使用更精确的算法保持边缘特征,适合有清晰边缘的物体。
定向:重新定向点云法线,如果有选择,则定向选择部分的点云。
光滑(支持有序点云):光滑点云法向量。参数Bilateral用于表示是否采用双边滤波的光滑算法。
Sharp:锐化点云的法线。
显示:切换点云显示是否应用法线
修复
孤立项(支持有序点云):去除点云离群孤立项. 需要先计算好法线。参数意义为孤立值阈值,小于这个值的点会被去掉。这个值的几何意义为,点云被分割为不同的块,每个块内点的孤立值为块内点数占总点数的比例。最后可以用“选择-删除”按钮删除选中的点。
飞点(支持有序点云):去除点云飞点。需要先计算好法线。参数意义为孤立值阈值,小于这个值的点会被去掉。这个值的几何意义为,点云被分割为不同的块,每个块内点的孤立值为块内点数占总点数的比例。最后可以用“选择-删除”按钮删除选中的点。
提示:飞点与孤立项的区别-飞点是贴近曲面的噪点,孤立项是远离曲面的一小片点云。可以关掉法线显示(法线-眼睛图标),更容易看到检测出的红色点云部分。
重叠检测:检测点云中重叠部分,需要先计算好法线。参数意义为最大重叠距离(当前点云密度的倍数),超出这个距离的则不会判定为重叠。
光滑(支持有序点云):光滑点云. 参数为光滑的迭代次数,迭代次数越多,光滑得越厉害. 点云光滑有两种类型,Fast类型速度更快,默认类型能更好的保持住模型的细节
选择:从左至右按钮依次是:右键方框选择,右键方框取消选择,删除选择,是否忽略背面,返回右键平移,移动点云,点云边界选取,清除选择,反向选择,增加选择点,选择特征点
点云边界选取参数:boundarySize,边界厚度.
用拟合的方法重建三角网格,点云如果有颜色,三角化的网格也会继承点云的颜色。开网格选项会保持点云原有形状,闭网格会把点云中的小洞补上。
参数-Density:支持两种类型的参数,一种是基于Quality的,一种是基于格点密度的。
参数-Quality:重建质量,范围[0, 6](浮点数),数字越大精度越高,速度也越慢.
参数-GridInterval用于设置重建过程中的空间格点密度,该参数定义了在基于隐式曲面的拟合算法完成之后,将连续曲面离散化为三角网格时所采用的空间格点边长。默认情况下,其取值为当前点云的密度。
参数-HoleAreaRatio:在闭网格的情况下,洞面积与网格面积的比值小于这个参数的洞,才会被填上
参数-MaxSubPointCount在软件首页设置中配置,当点云数据量超过该设定值时,系统将自动调用大数据重建版本。该版本通过将点云分割为多个子片进行处理,确保每个子片的点数不超过MaxSubPointCount上限。这种分片处理机制能有效降低内存占用,使普通计算机也能够胜任大规模点云数据的重建任务。
下面是一些用拟合方法重建的网格例子(更多的例子参考网页):
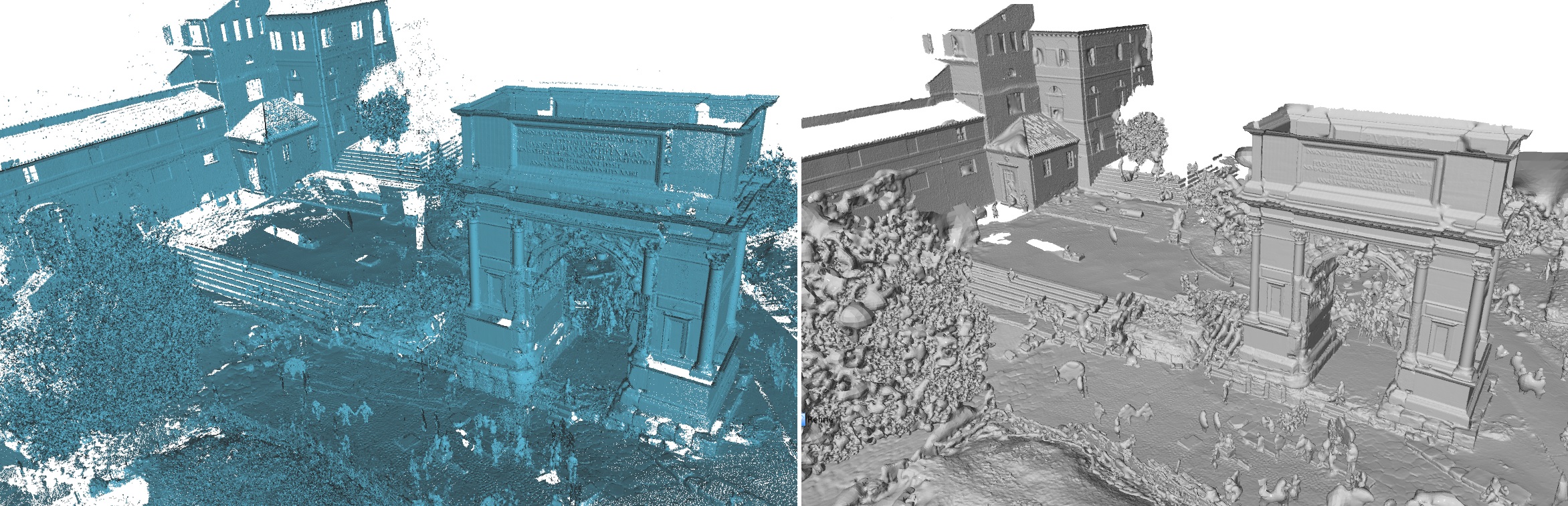
ETH_PRS_TLS Arch
用三角化的方法重建三角网格,网格的顶点就是点云的点。
参数-MaxFillHoleSize 用于在网格重建过程中自动修补孔洞,其功能为:当检测到的孔洞其包含的顶点数量不超过本参数所设定的上限值时,系统将自动尝试填充并闭合该孔洞。
参数-SmoothCount用于在重建网格时对点云进行光滑处理后再执行三角化,该值表示光滑处理的次数。重建后的网格顶点仍使用原始点云数据,此参数主要适用于噪声较明显的点云,其核心思路是在光滑后的点云基础上建立三角网格的连接拓扑关系。
参数-MaxSubPointCount在软件首页设置中配置,当点云数据量超过该设定值时,系统将自动调用大数据重建版本。该版本通过将点云分割为多个子片进行处理,确保每个子片的点数不超过MaxSubPointCount上限。这种分片处理机制能有效降低内存占用,使普通计算机也能够胜任大规模点云数据的重建任务。
下面是一些用三角化的方法重建的网格例子(更多的例子参考网页):
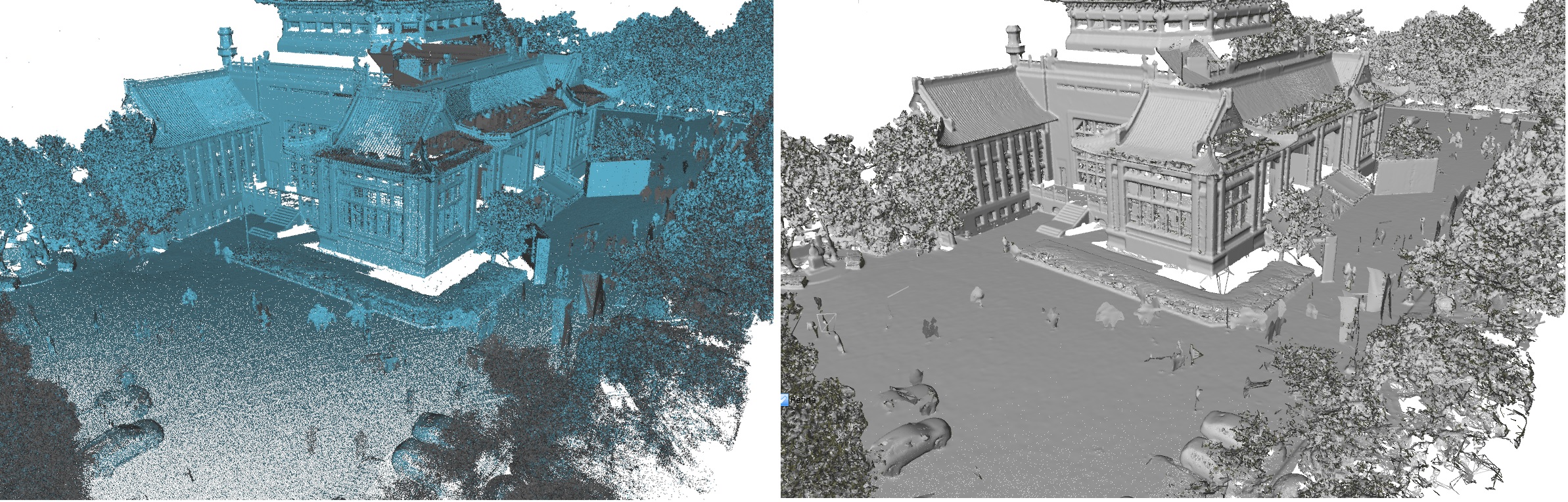
WHU-TLS HeritageBuilding
将无序的三维点云数据转换为四边形网格曲面。这里提供了两种不同策略的算法,用于从点云重建四边形网格。这两种方法分别针对不同的需求场景:第一种追求高保真度,尽可能保留原始点云数据;第二种追求高规整度,通过预处理生成更规则的点集,从而得到几何特征更对齐、质量更高的四边形网格。
四边形:这种方法的核心思想是直接在原始点云的基础上进行网格化,最大限度地忠实于原始数据。参数-MaxFillHoleSize:重建网格的时候,如果洞的顶点数不超过MaxFillHoleSize, 则会尝试把这个洞补上。
几何对齐:这种方法会在原始点云的几何表面上,重新采样一组新的点。这组点的分布与潜在的几何特征对齐的。然后再生成四边形网格。 参数-QuadEdgeLen:重建的四边形网格的期望边长。参数-MaxFillHoleSize:重建网格的时候,如果洞的顶点数不超过MaxFillHoleSize, 则会尝试把这个洞补上。
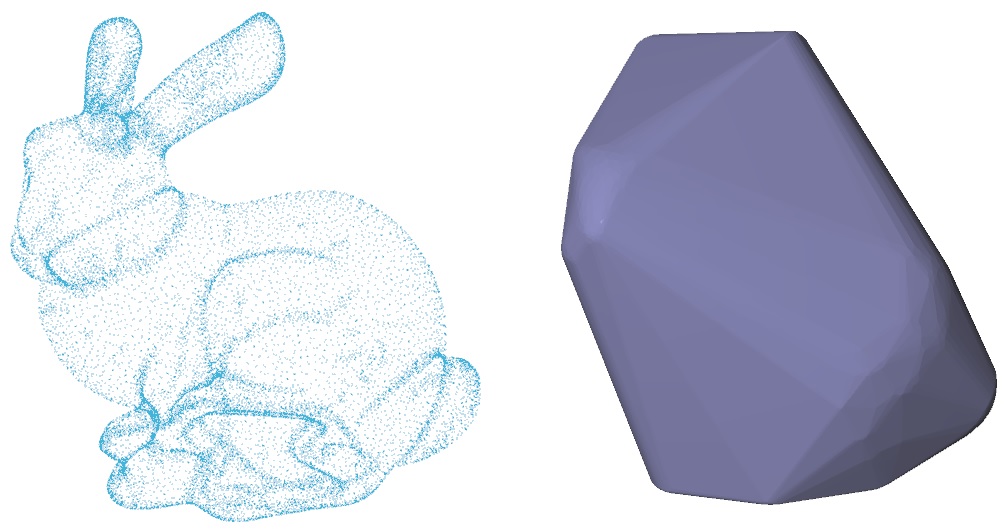
三维点云的凸包的Delaunay四面体化
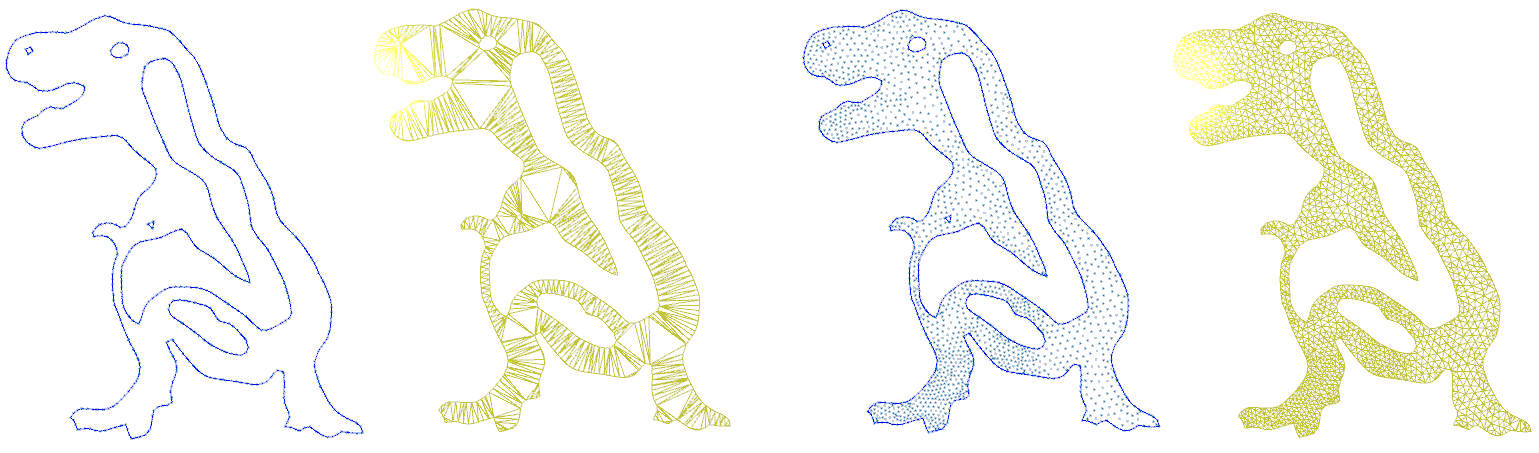
网格2D-投影:把点云投影到二维平面,当前视角面为投影平面
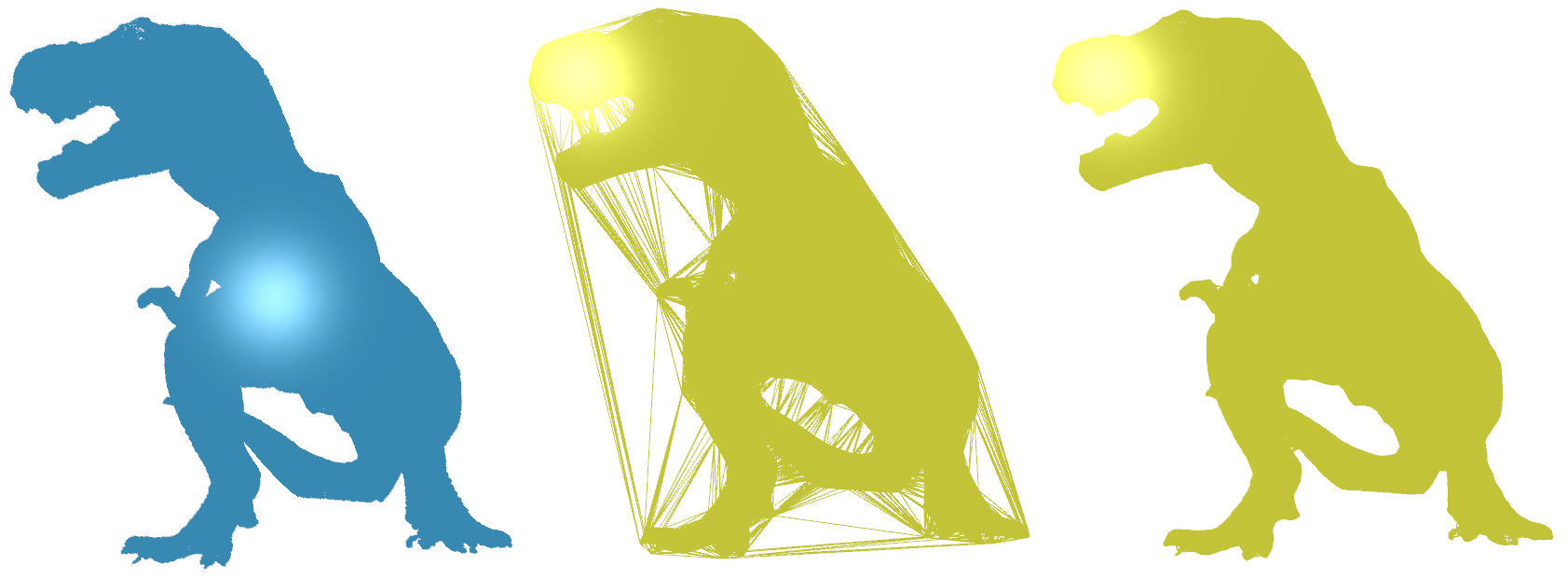
网格2D-凸包:二维点云的凸包的Delaunay三角化。如下中图所示
网格2D-三角化:二维点云的Delaunay三角化。如下右图所示
网格2D-CDT:二维点云的带约束的Delaunay三角化。
颜色
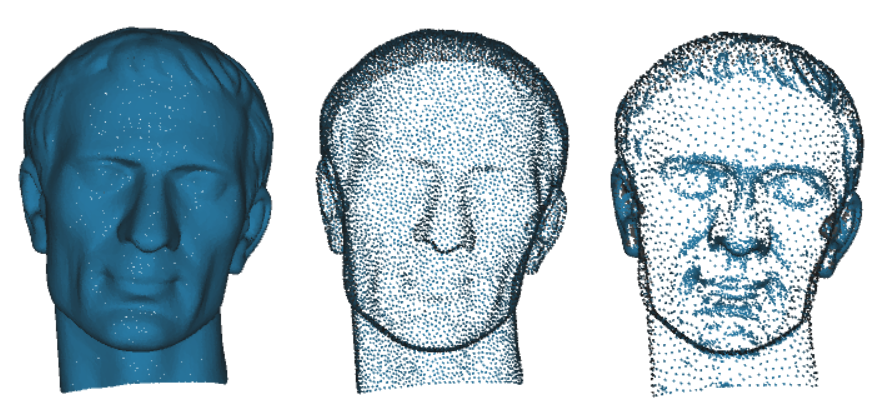
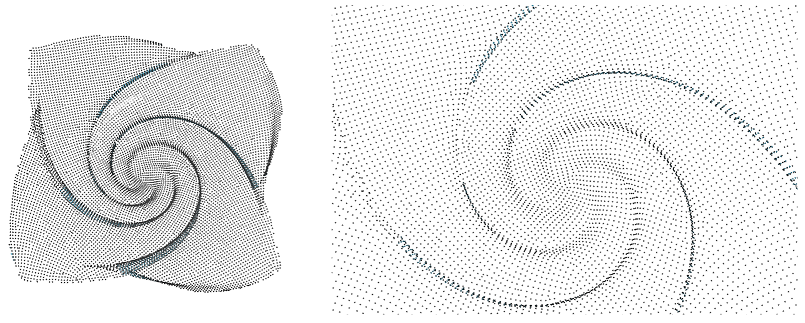
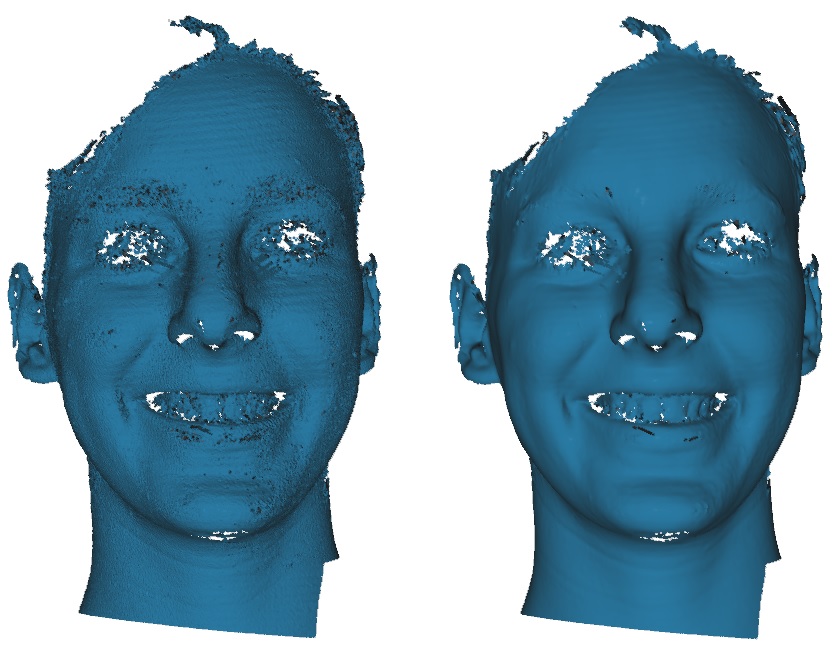
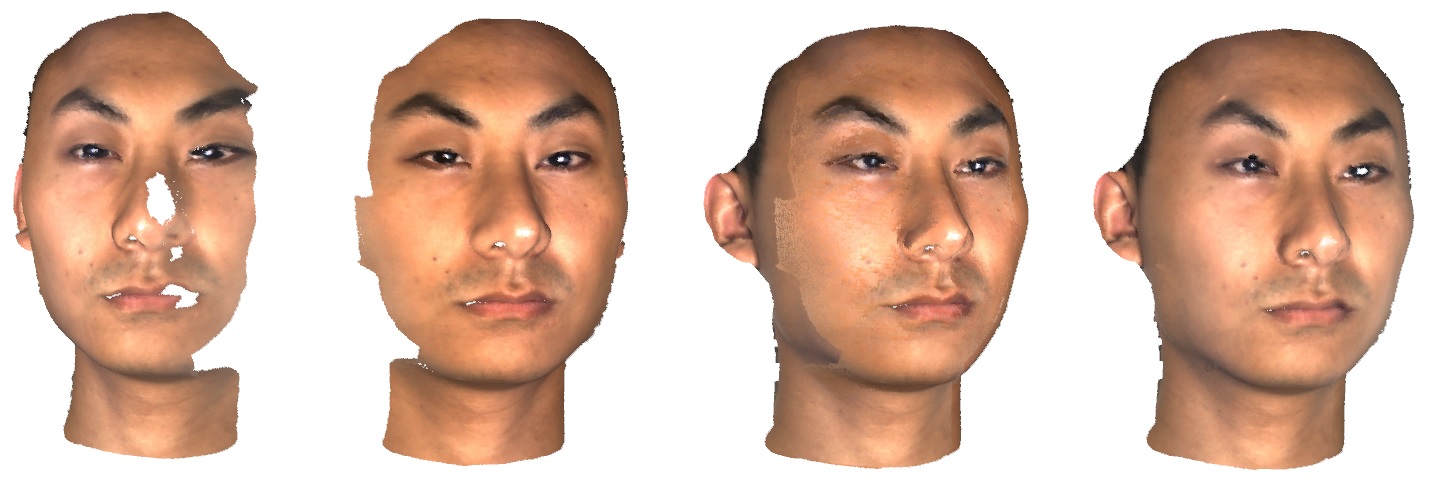
颜色融合:多帧点云注册融合后,不同帧之间的颜色往往有些差别,颜色融合去掉不同帧颜色的色差。如下图所示,图1,2两帧彩色点云,分别看质量还可以,但是注册到一块时,如图3所示,会有明显的色差。应用多角度点云颜色融合的功能,图4就是色彩融合后的效果。
 输入:彩色点云,点云每个点需要一个colorId信息(Int值)。相同colorId的点可以认为是颜色协调的,不同colorId的点颜色需要融合到一块,得到整体颜色协调的彩色点云。在点云注册模块里经过全局注册融合后的点云有这个信息。 前三个参数为颜色分量最大色差融合阈值,范围是[0, 1],如果colorId边界处的色差大于这个阈值的地方,则不做颜色融合。三个分量的意义分别为色度,饱和度,亮度。比如想尽量保持住色度,则可以调小其阈值。第四个参数为点云邻域个数,建议参数为12。如果点云非常不均匀,比如线激光数据,请使用纹理应用的颜色融合功能。
ColorId:导入ColorId信息
保存:保存ColorId信息
显示:显示ColorId。相同颜色代表同一个ColorId
输入:彩色点云,点云每个点需要一个colorId信息(Int值)。相同colorId的点可以认为是颜色协调的,不同colorId的点颜色需要融合到一块,得到整体颜色协调的彩色点云。在点云注册模块里经过全局注册融合后的点云有这个信息。 前三个参数为颜色分量最大色差融合阈值,范围是[0, 1],如果colorId边界处的色差大于这个阈值的地方,则不做颜色融合。三个分量的意义分别为色度,饱和度,亮度。比如想尽量保持住色度,则可以调小其阈值。第四个参数为点云邻域个数,建议参数为12。如果点云非常不均匀,比如线激光数据,请使用纹理应用的颜色融合功能。
ColorId:导入ColorId信息
保存:保存ColorId信息
显示:显示ColorId。相同颜色代表同一个ColorId
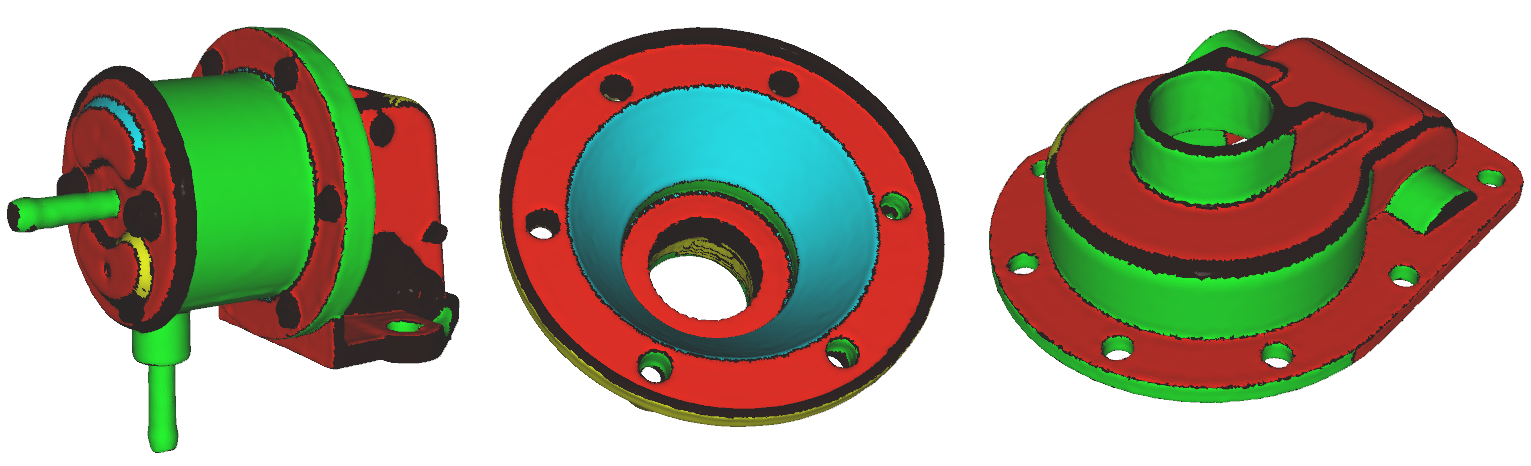
基本形检测: 检查点云中的基本形,包括球面,圆柱面,圆锥面和平面。不同的基本形用不同的颜色表示。如下图所示,红色-平面;绿色-圆柱面;黄色-球面;蓝色-圆锥面。它和三角网格基本形检测是类似的,不同的是输入数据的类型不同。测试数据可以是扫描数据,也可以通过网格采样把网格数据转化为点云数据。
选择基本形:用户可以通过鼠标拾取来选择对应区域的基本形。
增强: 一些点云增强的算法。
特征点:增强点云的特征点
特征线:计算点云的特征线
分割:带标记点的点云分割。可以先用标记按钮生成MarkNum个标记点,然后再点击分割按钮进行点云分割。参数Dist-是否根据距离来分割。
如果您有任何疑问和建议,欢迎发email: