纹理模块 包含纹理贴图模块和颜色处理模块
扫描点云纹理贴图制作 (由于纹理贴图的输入数据类型比较多,用户如有不清楚的地方,欢迎来咨询测试)
输入:深度点云+点像对应+对应图片
点像对应:每个深度点云有对应的图像,点像对应是点到图像像素的对应。点像对应的格式为:map|mmap。
测试方法:在点云注册应用里,“全局-导入”注册好的点云,然后“全局-点像对应”导入点像对应文件和图片,最后“全局-纹理图”一键创建带纹理的网格。注意:导入点像对应文件和图像后,点云会去对应的像素点拾取颜色。可以根据点云的颜色来检验点像对应文件是否正确。
网格纹理贴图制作
输入:带纹理坐标的网格+点像对应+对应图片
带纹理坐标的网格:网格的纹理坐标可以通过UV展开计算得到。
点像对应:文件具体格式为:vii|fii|viis。注意:vii和fii的区别在于,vii是每个顶点有一个点像对应;fii是每个三角片的顶点有一个点像对应。viis是一个网格顶点可能有多个图片的像素对应。纹理贴图的时候,所有格式的点像对应最终都会转化为fii格式的信息。
测试方法;在纹理贴图应用里导入带纹理坐标的网格,如果网格没有纹理坐标,可以在UV展开模块计算。然后在“点像对应-导入”导入点像对应文件(viis文件会自动计算为fii格式的点像对应)。最后“纹理图-用图像制作纹理贴图”。
网格的点像对应信息也可以通过深度点云(带有点像对应)投影到网格上。测试方法:在纹理贴图应用里导入网格,然后在"点像对应-点云"导入“深度点云+点像对应+图片”。程序自动为网格计算点像对应。
viis格式的点像对应割缝优化(viis格式自动计算为fii格式的点像对应)
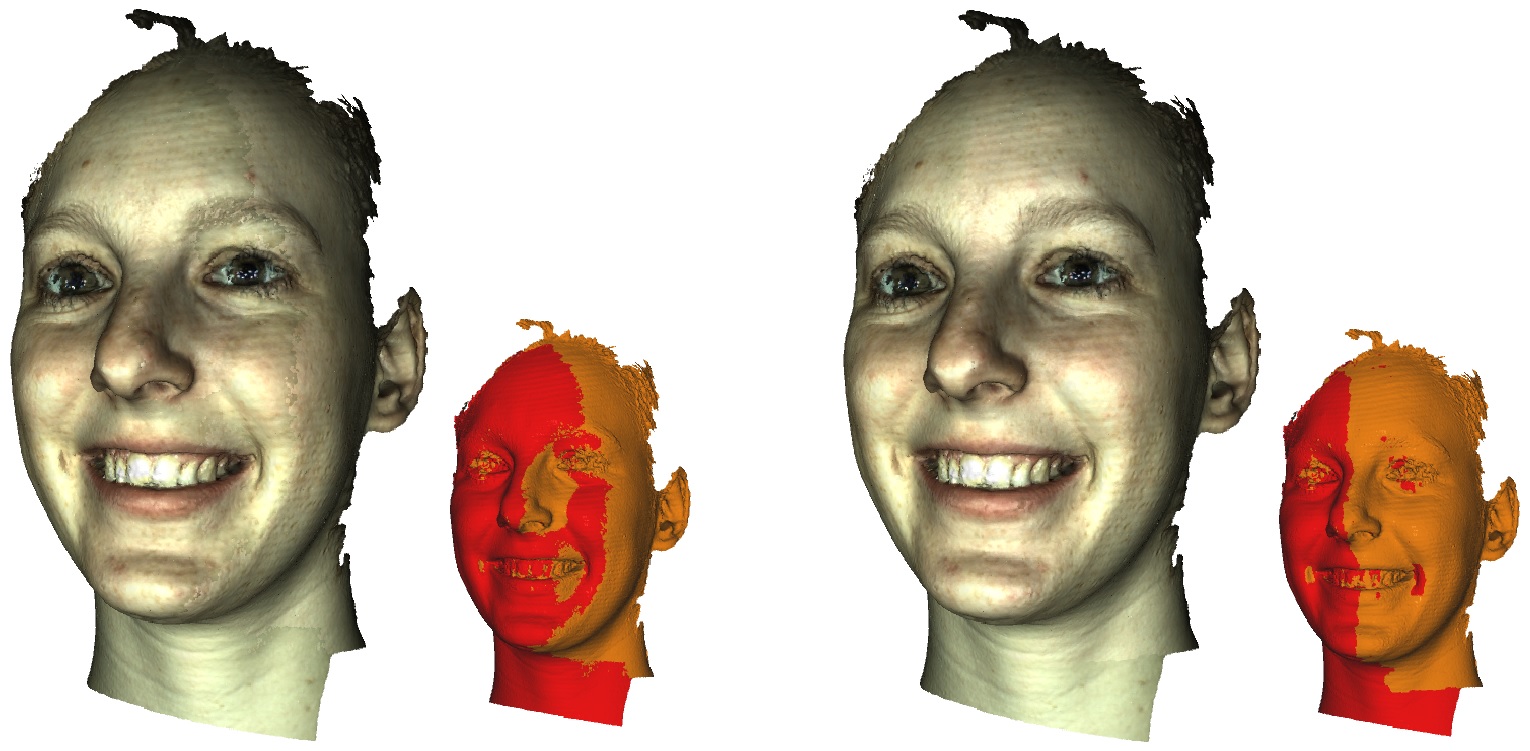
有些网格顶点带有多个点像对应信息,也就是在网格某些区域有多副图重叠。优化的目的是,给每个三角片计算一个唯一的点像对应,并且具有不同图之间的割缝色差最小的性质。如下图所示,不同的颜色代表不同的图片。左边贴图有明显的图像缝隙痕迹。右边贴图是优化后的结果,图像缝隙色差减小很多。
点云扫描黑边修复
背景:当摄像机固定,物体自身旋转,比如在转台上,然后单光源固定于模型前面。这种方式采集的图像,有个共同的缺点,就是单帧物体的边缘颜色会比较暗。
输入数据:全局注册好的彩色点云。
测试方法:在注册应用里,“全局-导入”所有彩色点云,然后“颜色融合-精确”。参数为点云密度的倍数,用于判断不同帧点云是否有重叠,默认为1倍。如果点云比较密,或者对齐效果不是很理想,可以适当提升点云密度倍数。

多角度点云颜色融合
背景:有时候,虽然单帧图像色彩质量是好的,但是不同帧之间的光照有差异,比如多个拍照位置的情况。
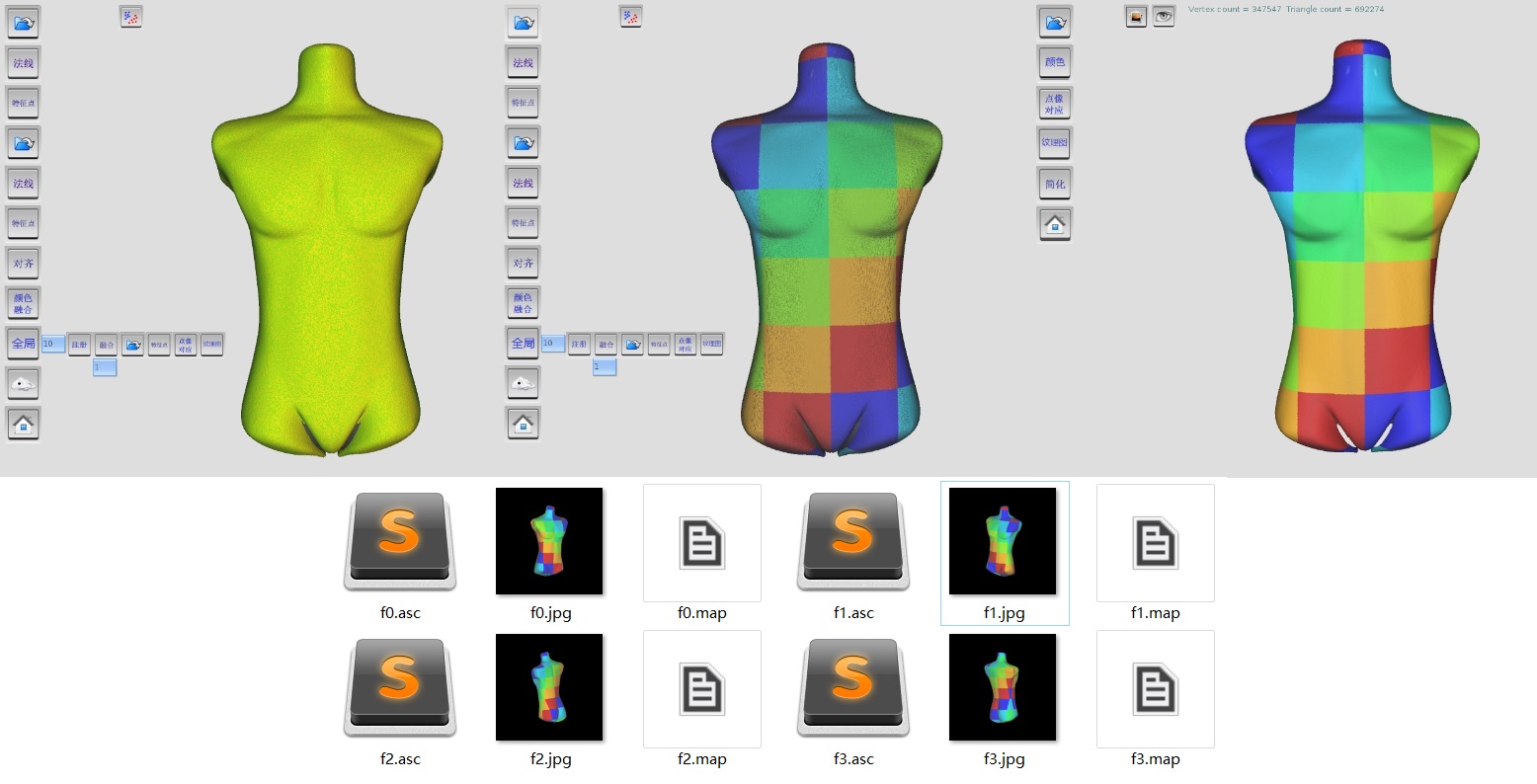
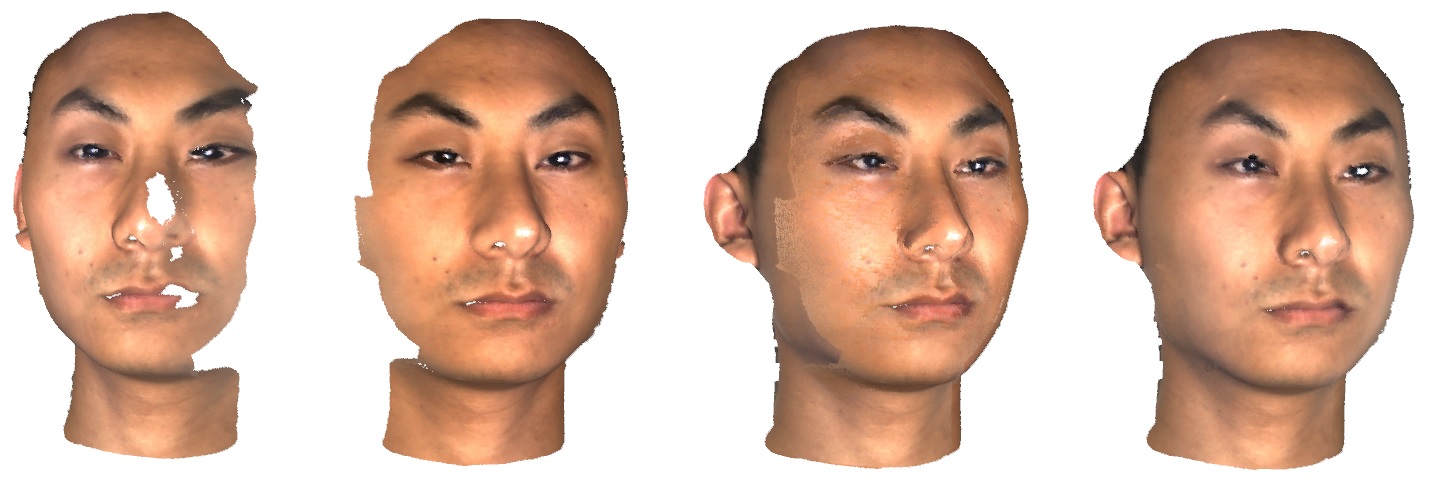
如下图所示,图1,2两帧彩色点云,分别看质量还可以,但是注册到一块时,如图3所示,会有明显的色差。应用多角度点云颜色融合的功能,图4就是色彩融合后的效果。
输入:彩色点云,点云每个点需要一个colorId信息(Int值)。相同colorId的点可以认为是颜色协调的,不同colorId的点颜色需要融合到一块,得到整体颜色协调的彩色点云。
colorId:点云在注册模块里,经过全局注册融合后的点云,每个点有个cloudId信息(点所在点云的Id),这个信息可以作为colorId。
colorId也可以通过用户输入点像对应文件(.cid)来得到。
ColorId文件具体格式为:
文件名.cid
colorIdCount
colorId_0
colorId_1
......
colorIdCount为colorId的个数,一般等于对应点云或者网格的顶点数,colorId_n为第n个点的colorId的信息。
测试方法:点云应用->颜色-颜色融合:导入ColorId信息。然后,前三个参数为颜色分量最大色差融合阈值,范围是[0, 1],如果colorId边界处的色差大于这个阈值的地方,则不做颜色融合。三个分量的意义分别为色度,饱和度,亮度。比如想尽量保持住色度,则可以调小其阈值。第四个参数为点云邻域个数,建议参数为12。
网格的颜色融合功能:如果点云非常不均匀,比如线激光数据。点的邻域不是圆盘结构,则可以使用 网格的颜色融合功能:纹理应用-颜色融合。输入要求是,网格每个顶点也需要一个colorId信息。用户可以导入点像对应文件(.cid)来得到。
如果您有任何疑问和建议,欢迎发email
