Kinect数据
Kinect V1 和 V2 比较
Kinect V1 和 V2 的外观比较

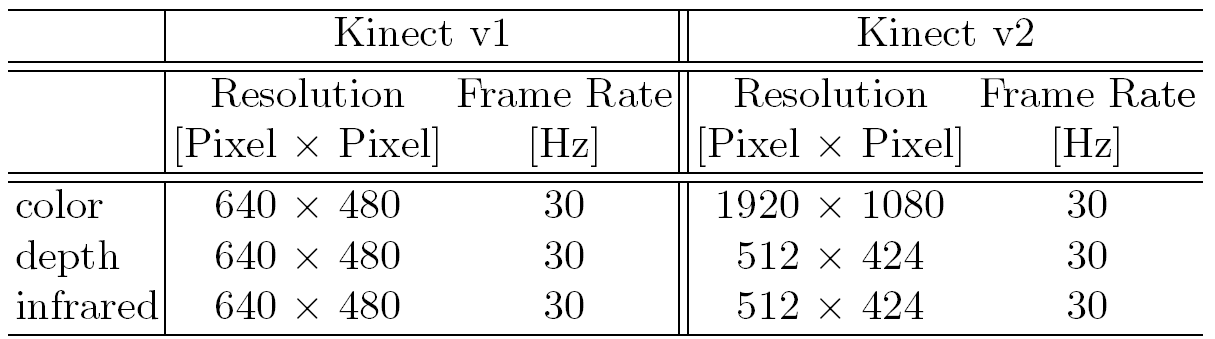
Kinect V1 和 V2 的参数比较
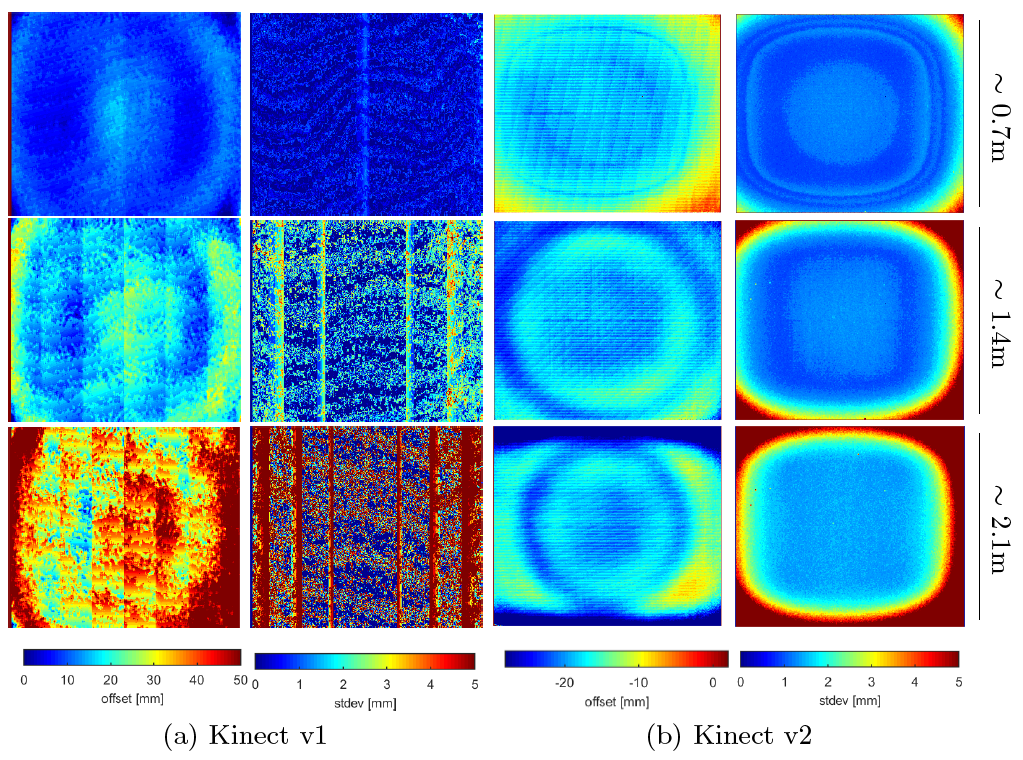
Kinect V1 和 V2 随距离增加的误差分布
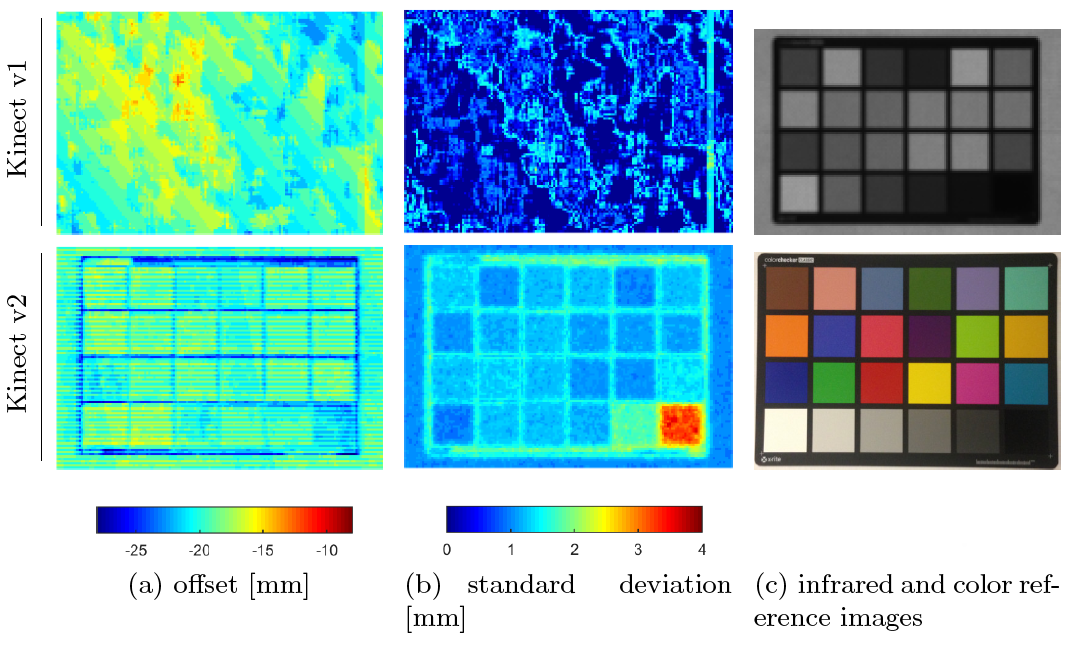
Kinect V1 和 V2 颜色误差分布
Kinect V2 在边界处有飞点
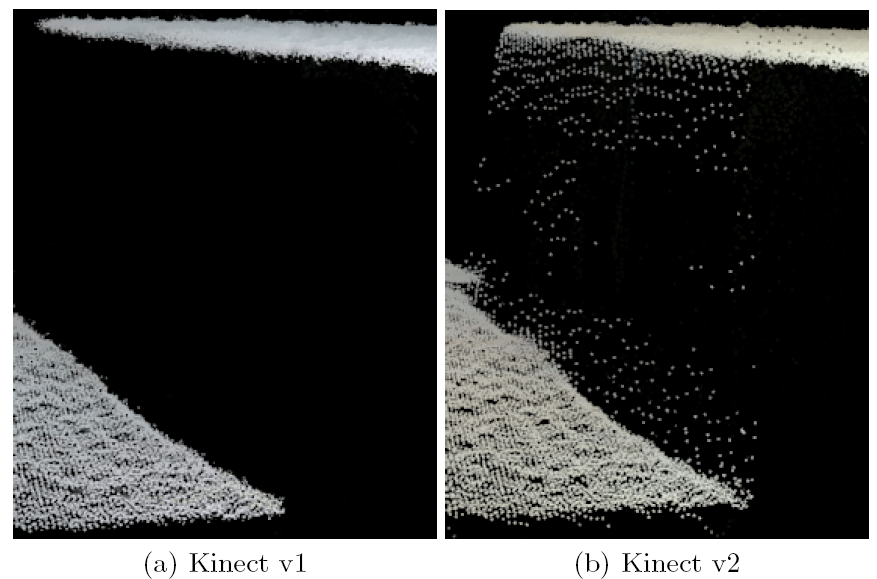
参考文献:Comparison of Kinect V1 and V2 Depth Images in Terms of Accuracy and Precision - ACCV2016
Kinect数据如何处理?精度很低吗
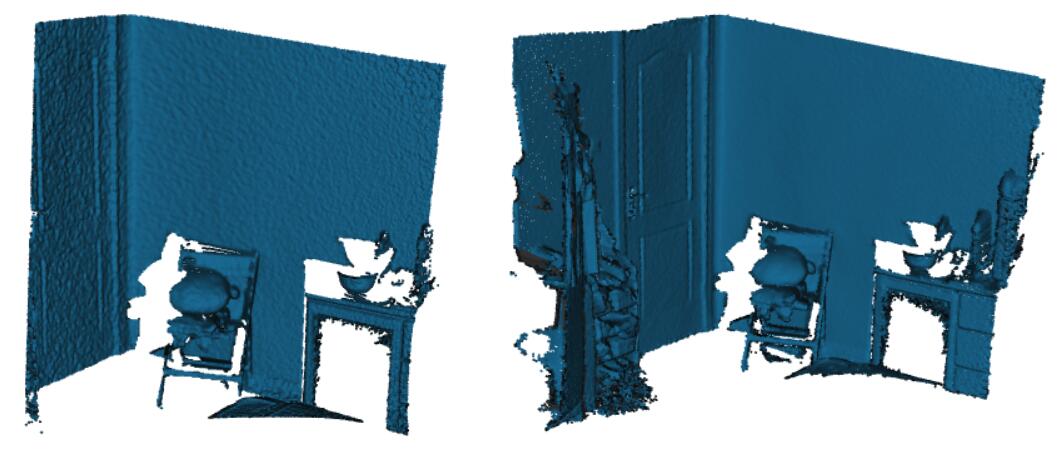
Kinect数据属于低精度的深度视频数据,两个特点:一个是精度低,一个是视频数据。可以应用KinectFusion技术把连续的K(比如K取30)帧数据融合到一块,作为一帧数据用于后续处理。如下图所示,左图是一帧数据,右图是取了连续的30帧数据融合到一块的数据。
KinectFusion是什么
KinectFusion的详细介绍可以参考专题 KinectFusion介绍
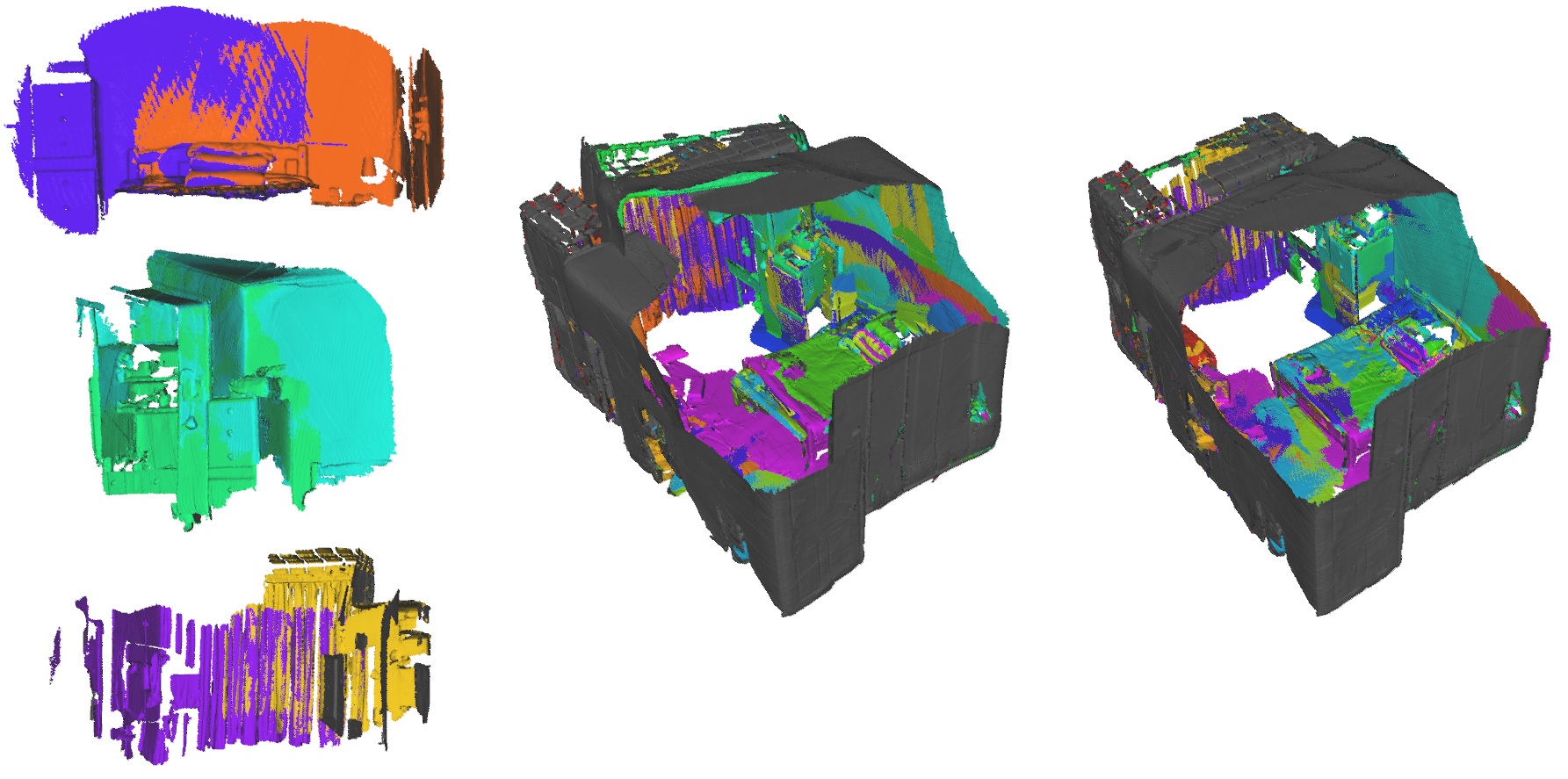
为什么需要全局注册
Kinect数据精度不高,在扫描一些大物体的时候,注册误差会累积得很厉害。如下图所示,第一列截取了三对ICP注册后的点云,局部来看注册得很好。然后逐对点云两两ICP注册,如中图所示,点云注册的效果并不好,累计误差很严重。第三列是点云经过全局注册后效果,注册误差被分散到每一帧中去了,从而减少整体的注册误差。