LiDAR数据处理
无论是来自地面、车载、机载还是星载激光雷达的亿级点云,DeltaG凭借专为优化海量性、非均匀性与场景复杂性而生的核心算法,为您提供从网格重建到简化的完整、高效处理流程。
数据挑战
- 海量数据,硬件瓶颈:动辄上亿的点云导致内存溢出,计算耗时漫长。
- 数据质量参差不齐:点云分布严重不均、缺失与重影现象普遍,导致算法失效。
- 场景复杂,结构多变:城市场景、林区等地物复杂,包含大量非流形结构,违背传统算法假设。
解决方案
- 高性能计算架构:优化内存管理,轻松处理亿级点云,显著提升效率,降低硬件门槛。
- 强鲁棒性算法:我们的核心算法对数据噪声、非均匀分布及部分缺失不敏感,确保在复杂真实数据中也能产出可靠结果。
常见的LiDAR数据处理功能
下面是一些常见的LiDAR数据处理功能,DeltaG针对LiDAR数据特点,对几何算法做了优化。DeltaG的强大功能,源于其底层Geometry++几何算法库的卓越性能。您既可以直接使用DeltaG软件,也可以将同样的技术集成到您自己的系统中。
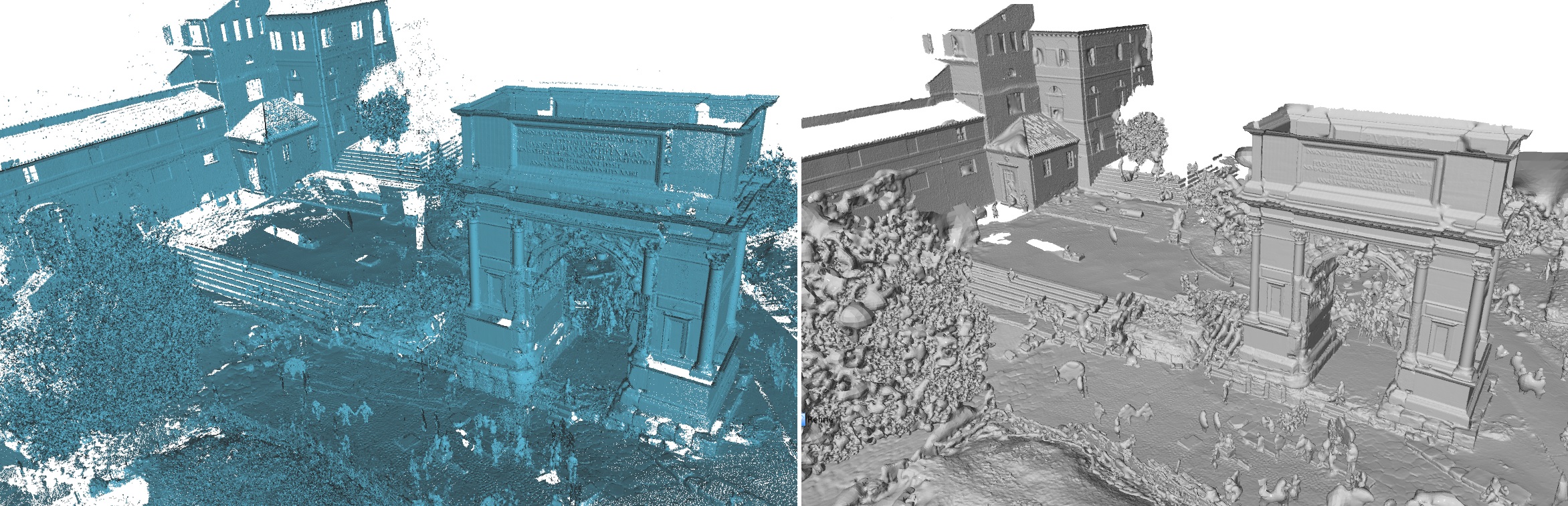
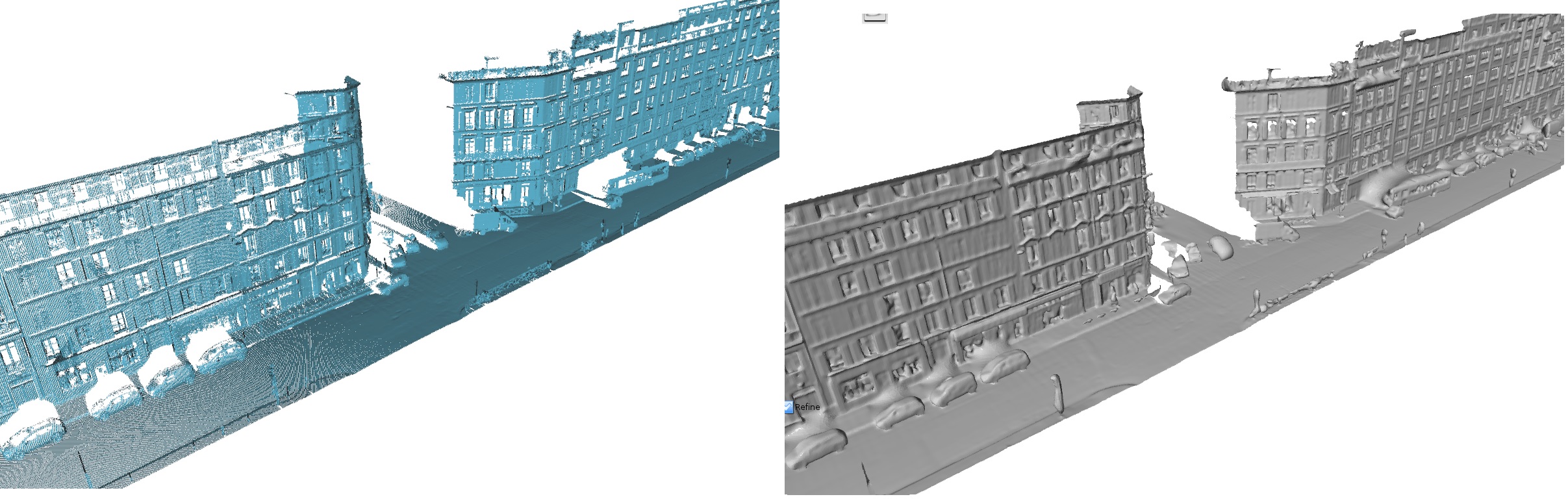
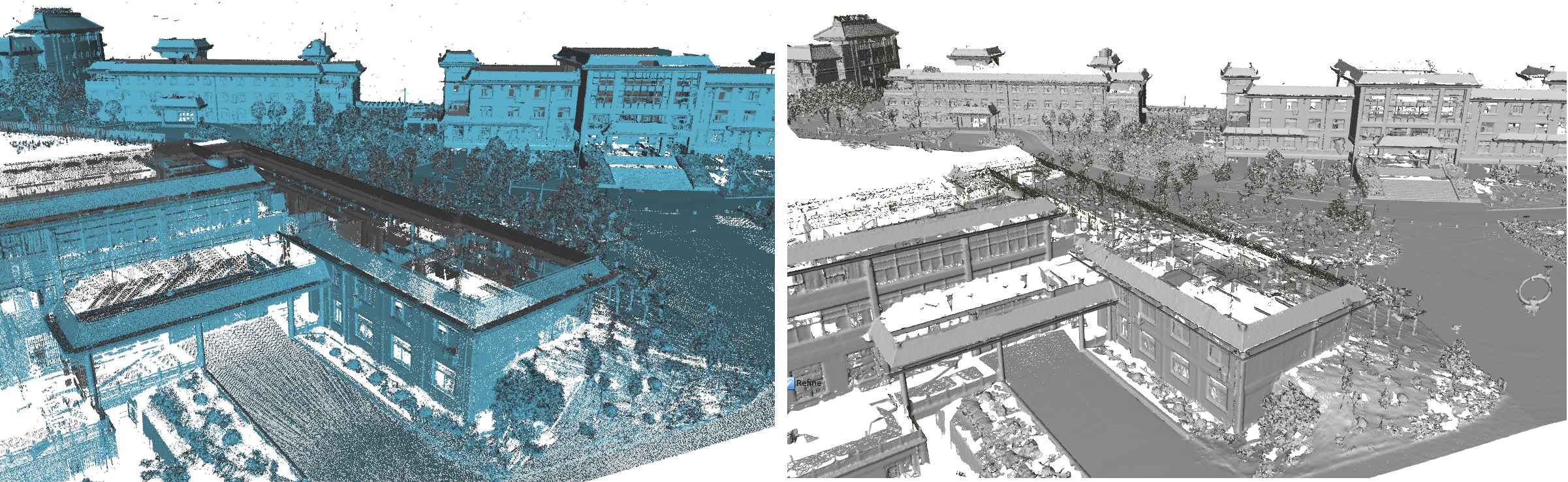
面向大场景的网格重建:从海量点云到连续三维网格
- 支持大数据点云(上亿点)
- 内存消耗少,速度快
ETH_PRS_TLS Arch
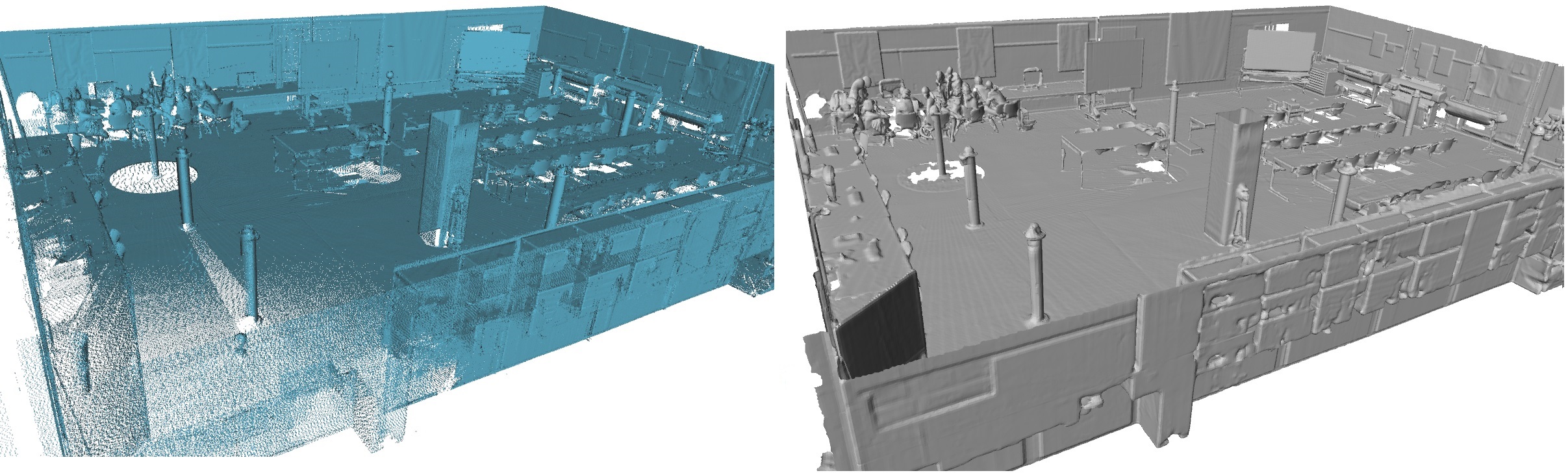
ETH_PRS_TLS Office
IQmulus&TerraMobilita Z0
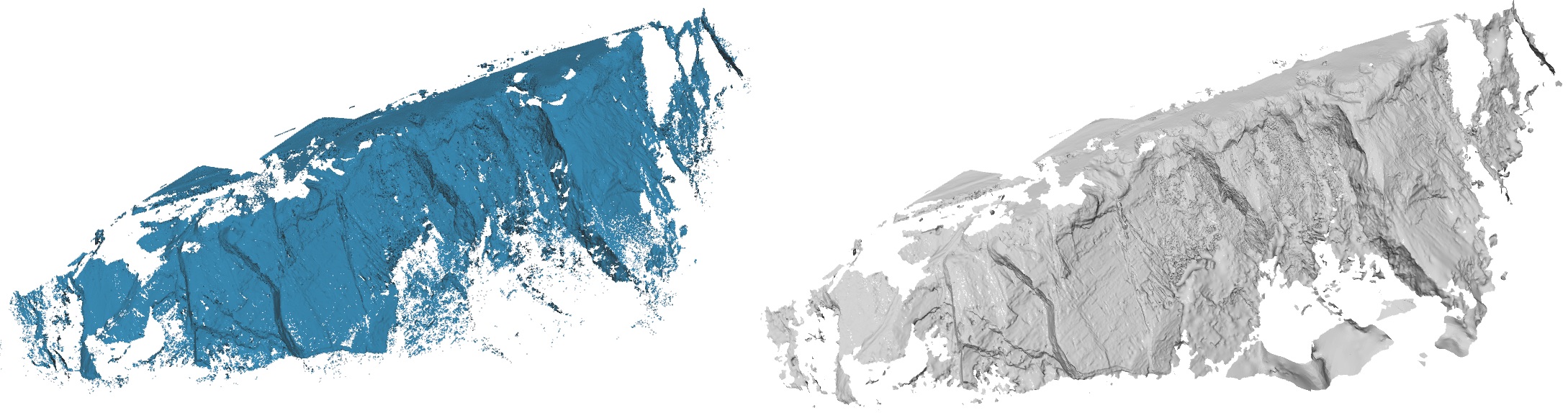
WHU-TLS Mountain

WHU-TLS HeritageBuilding

ETH_PRS_TLS Courtyard
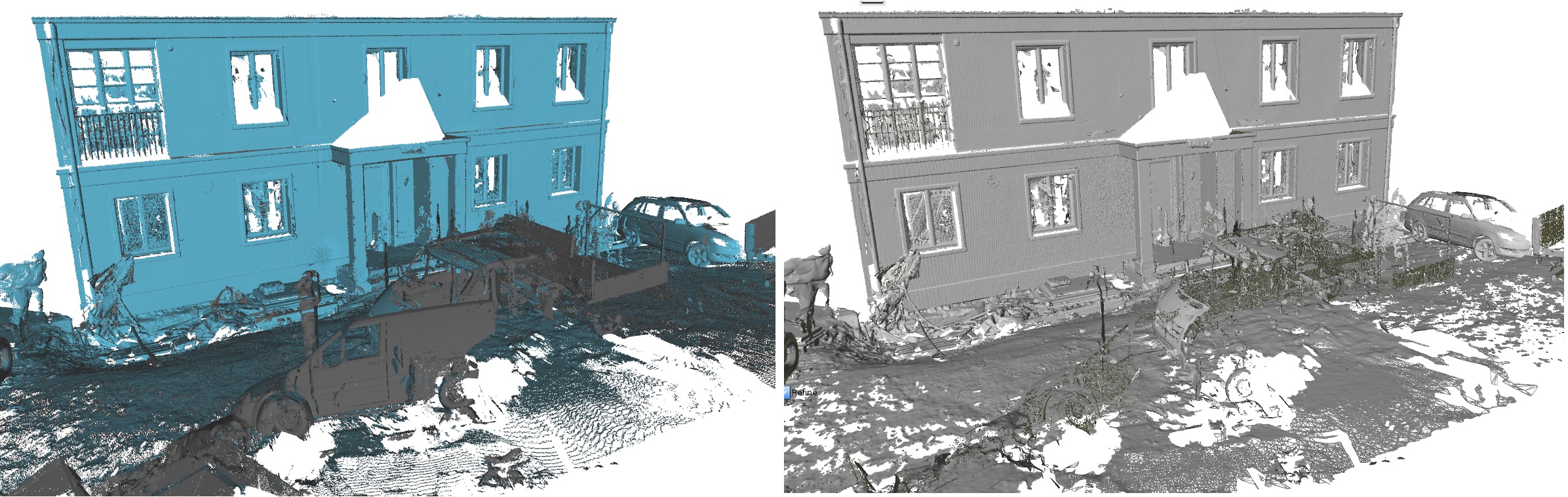
ETH_PRS_TLS Facade

ETH_PRS_TLS Office

ETH_PRS_TLS Trees

Bridge
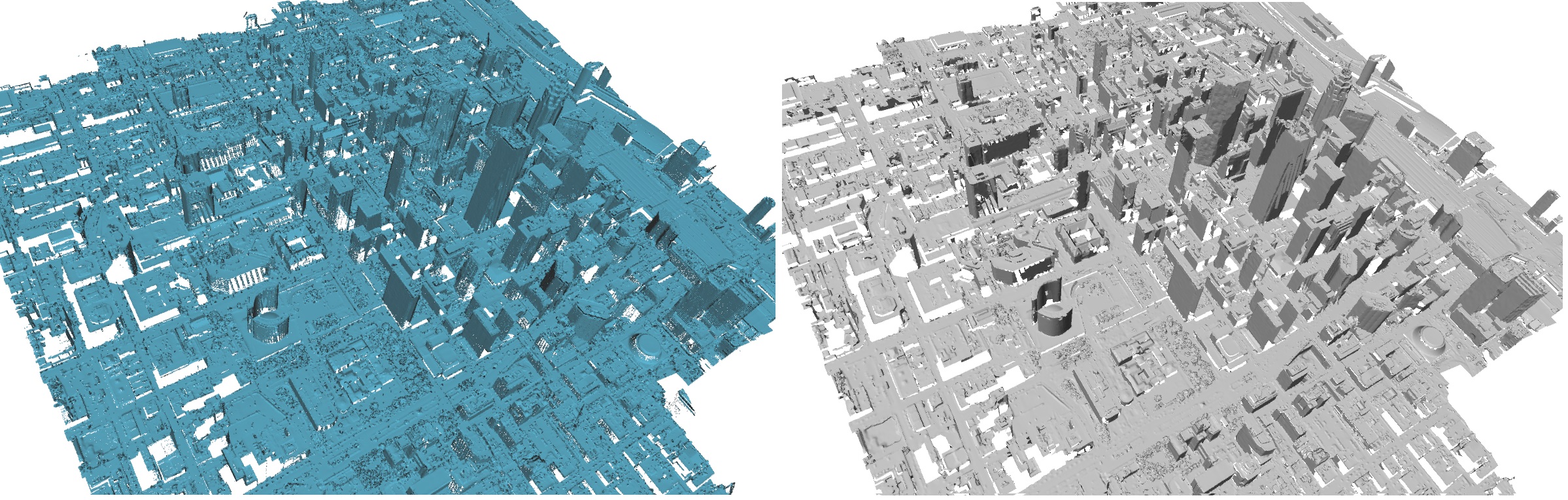
ISPRS_BENCHMARK Toronto ALS

IQmulus&TerraMobilita Z0
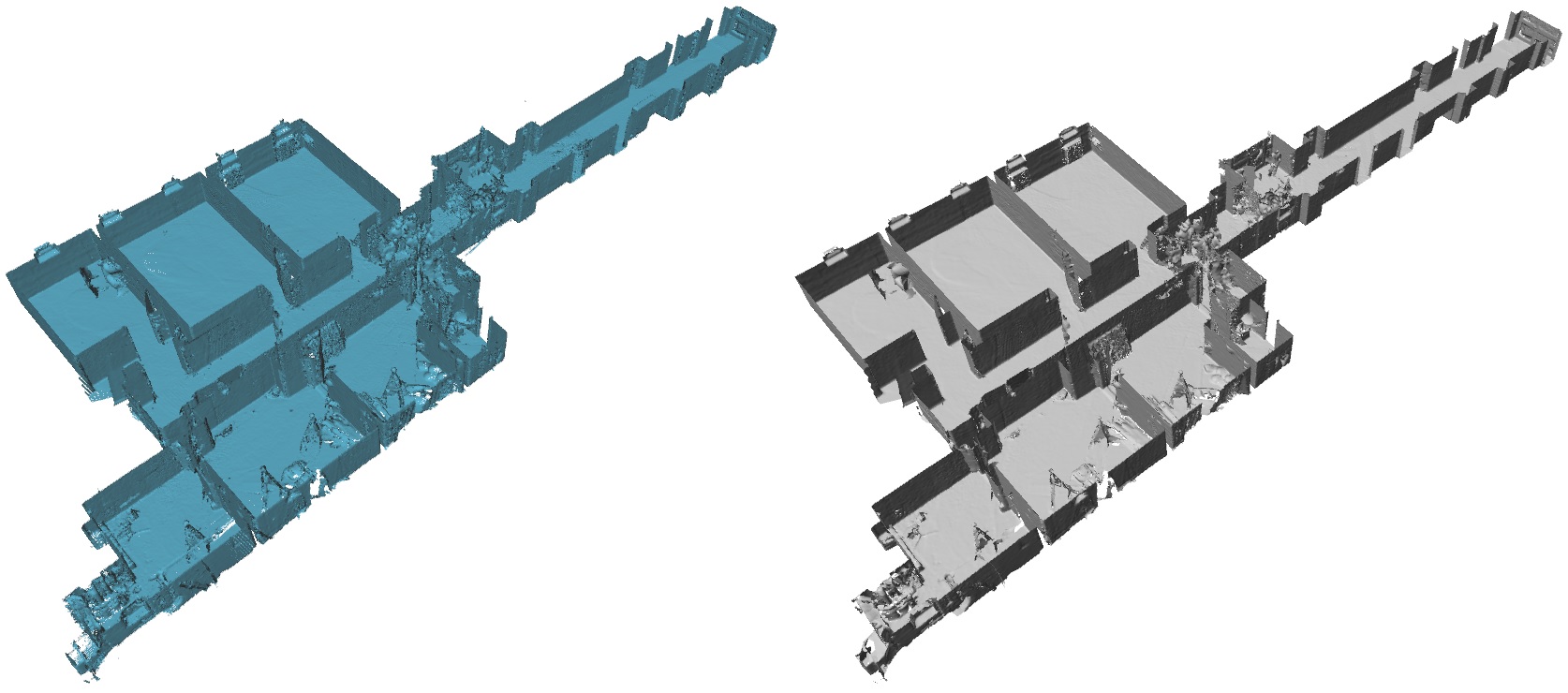
ISPRS_IndoorModeling CaseStudy1 TUB1

StGallenCathedral
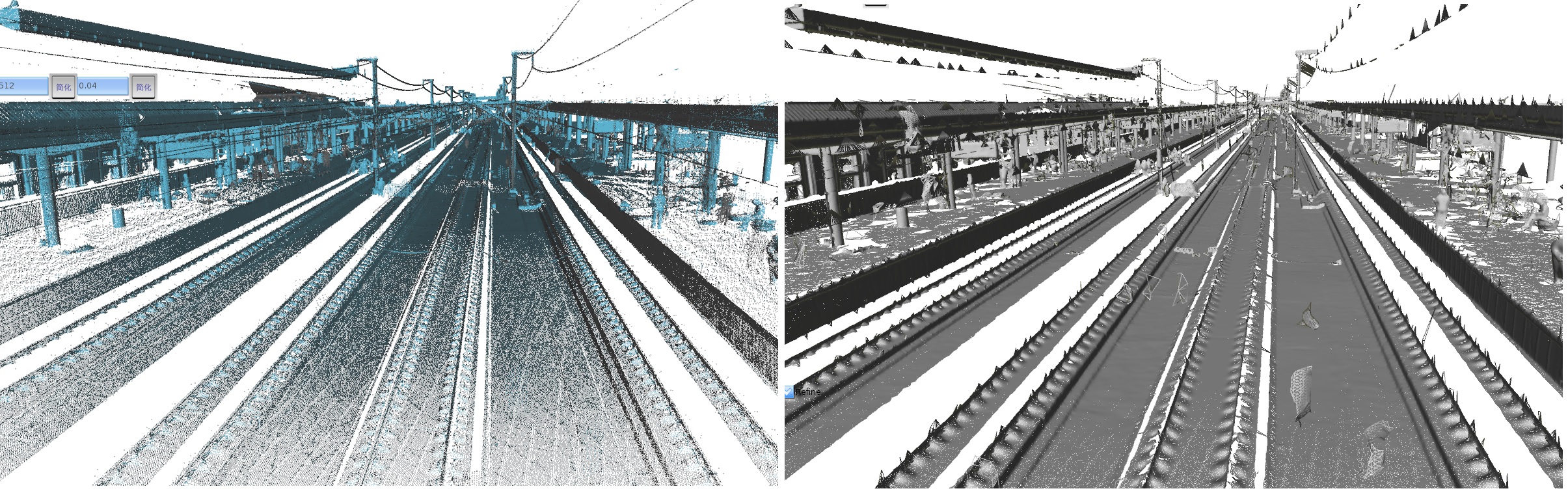
WHU-TLS Railway

WHU-TLS Mountain
WHU-TLS Park

WHU-TLS Campus
IQmulus&TerraMobilita Z0
WHU-TLS Mountain
WHU-TLS HeritageBuilding
ETH_PRS_TLS Courtyard
ETH_PRS_TLS Facade
ETH_PRS_TLS Office
ETH_PRS_TLS Trees
Bridge
ISPRS_BENCHMARK Toronto ALS
IQmulus&TerraMobilita Z0
ISPRS_IndoorModeling CaseStudy1 TUB1
StGallenCathedral
WHU-TLS Railway
WHU-TLS Mountain
WHU-TLS Park
WHU-TLS Campus
WHU-TLS HeritageBuilding
ETH_PRS_TLS Courtyard
ETH_PRS_TLS Facade
ETH_PRS_TLS Office
ETH_PRS_TLS Trees
Bridge
ISPRS_BENCHMARK Toronto ALS
IQmulus&TerraMobilita Z0
ISPRS_IndoorModeling CaseStudy1 TUB1
StGallenCathedral
WHU-TLS Railway
WHU-TLS Mountain
WHU-TLS Park
WHU-TLS Campus
ETH_PRS_TLS Facade
ETH_PRS_TLS Office
ETH_PRS_TLS Trees
Bridge
ISPRS_BENCHMARK Toronto ALS
IQmulus&TerraMobilita Z0
ISPRS_IndoorModeling CaseStudy1 TUB1
StGallenCathedral
WHU-TLS Railway
WHU-TLS Mountain
WHU-TLS Park
WHU-TLS Campus
ETH_PRS_TLS Trees
Bridge
ISPRS_BENCHMARK Toronto ALS
IQmulus&TerraMobilita Z0
ISPRS_IndoorModeling CaseStudy1 TUB1
StGallenCathedral
WHU-TLS Railway
WHU-TLS Mountain
WHU-TLS Park
WHU-TLS Campus
ISPRS_BENCHMARK Toronto ALS
IQmulus&TerraMobilita Z0
ISPRS_IndoorModeling CaseStudy1 TUB1
StGallenCathedral
WHU-TLS Railway
WHU-TLS Mountain
WHU-TLS Park
WHU-TLS Campus
ISPRS_IndoorModeling CaseStudy1 TUB1
StGallenCathedral
WHU-TLS Railway
WHU-TLS Mountain
WHU-TLS Park
WHU-TLS Campus
WHU-TLS Railway
WHU-TLS Mountain
WHU-TLS Park
WHU-TLS Campus
WHU-TLS Park
WHU-TLS Campus

应用场景
- 智慧城市与数字孪生: 快速处理机载/车载LiDAR数据,生成城市级实景三维模型。
- 勘测与工程: 为地形分析、土方计算、基础设施监测提供精确的网格模型。
- 林业管理: 从机载点云中重建林区地形和植被结构,用于林业资源调查。
- 文化遗产数字化: 对地面扫描得到的历史建筑、文物点云进行高精度重建与归档。
一些常见的激光雷达数据集:为了帮助您快速验证DeltaG在处理复杂、真实场景下的能力,我们推荐以下公开的激光雷达数据集。您可以直接下载这些数据,并导入DeltaG进行测试。
如果您有任何疑问和建议,欢迎发email
