点云序列拼接
适用数据类型
- 纯点云序列。适用于几何信息丰富的场景,用几何信息做拼接融合
- 带颜色的点云序列,如RGBD数据。适用于颜色信息丰富的场景,颜色信息可以辅助点云拼接
适用场景
- 前端拼接融合:一边采集点云,一边实时拼接融合
- 后端全局优化:全局优化点云序列的拼接精度,并做纹理贴图, 色彩融合
特点
- 前端:实时拼接 + 融合 + 局部全局优化
- 后端:全局优化 + 纹理贴图, 色彩融合
- 纯CPU计算
扫描应用案例
- 一边采集点云,一边实时拼接融合
- 扫描断开后自动续接
- 连续扫描,实时拼接
- 几何特征少的区域(平面)能通过颜色辅助拼接成功
- 白色墙面贴上彩色纸,用颜色辅助拼接
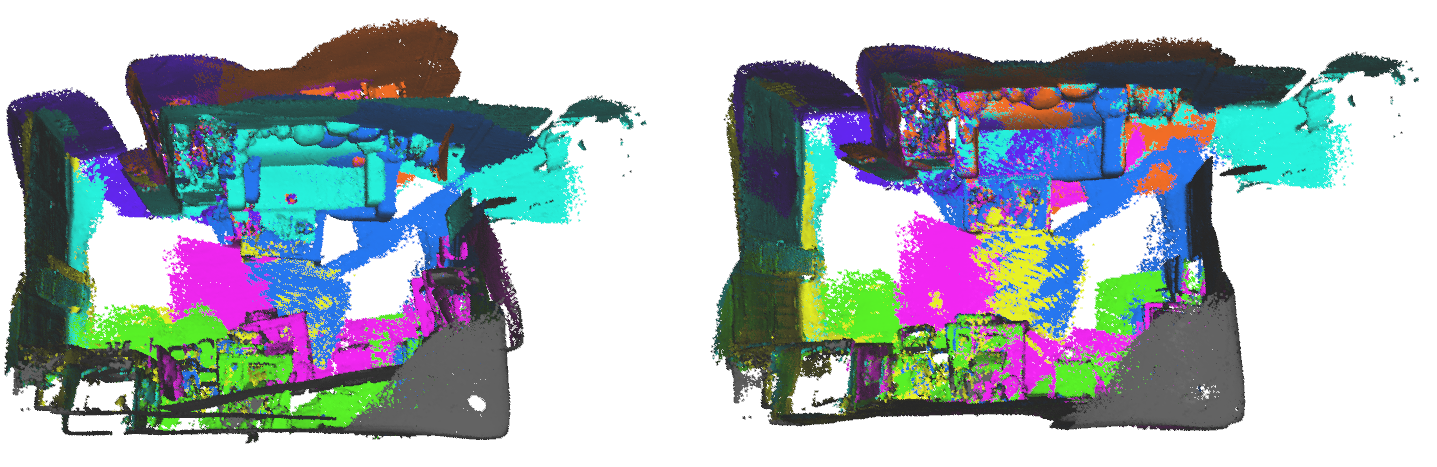
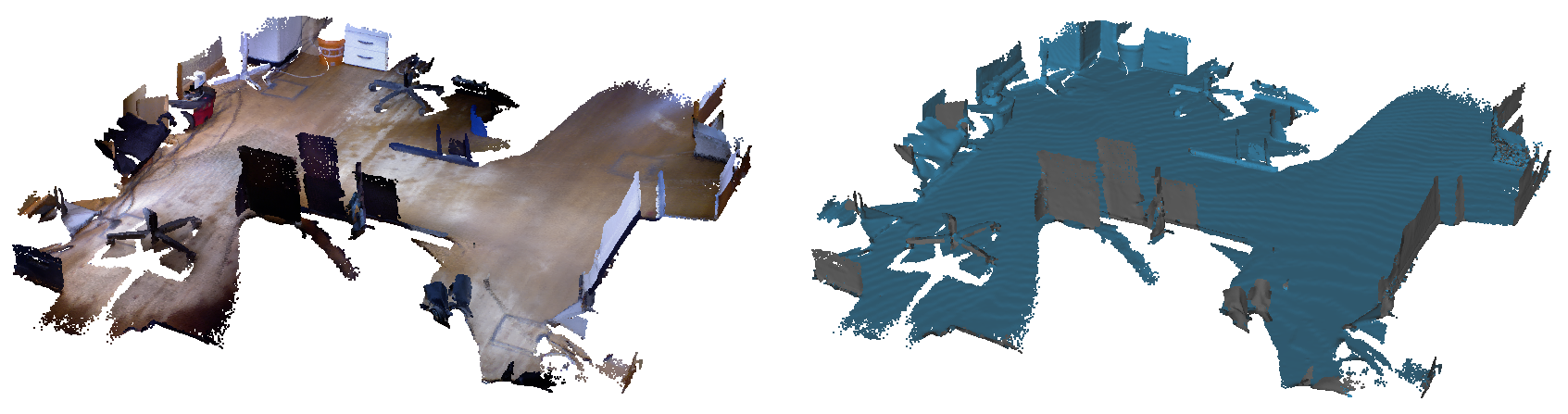
全局优化累计误差:前端扫描常有累计误差,全局优化可以减少回路带来的误差。下面是一个室内扫描的例子:左图是点云连续拼接的效果;右图采用了全局优化,闭合了回路。
稀疏帧序列的拼接跟踪:点云序列的拼接,通常需要帧序列是连续的。稀疏帧序列的拼接,使得扫描速度可以更快。如下图所示(左图是纯点云序列,右图是彩色点云序列),增加帧序列的采样间距来模拟扫描速度,扫描速度增加了2,4,8倍后,序列依然可以连续拼接。
激光扫描仪数据拼接(KITTI数据)
2011_09_30_drive_0018
2011_10_03_drive_0027
2011_10_03_drive_0034
SLAM前端的局部全局优化
SLAM前端实时配准点云时,有时候会遇到某些帧的点云质量不高,特别是在转角角度比较大的时候。这时候的局部配准误差会比较大,需要局部的全局优化来提高配准精度。下面是一些前端注册的例子,可以看到局部全局优化的作用。
SLAM前端实时配准融合的点云,在整体上往往有比较大的回路误差。全局注册可以减小回路误差。下面是一些示例数据,用于测试全局注册功能。
室内扫描数据

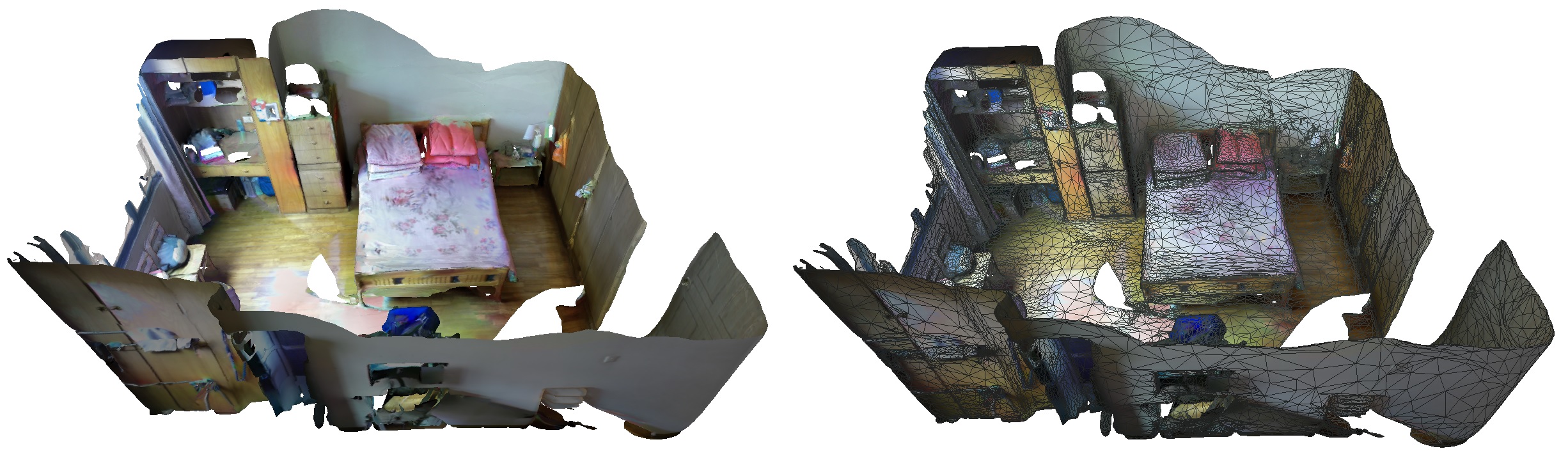
TUM RGBD的深度数据,精度低,Z值较大的部分( Z > 2 )扭曲大。仅用刚性配准是配不准的,会产生跷跷板的效果。我们加入了非刚性配准和点云拟合的方法,使得点云能配准到一块,消除重影。
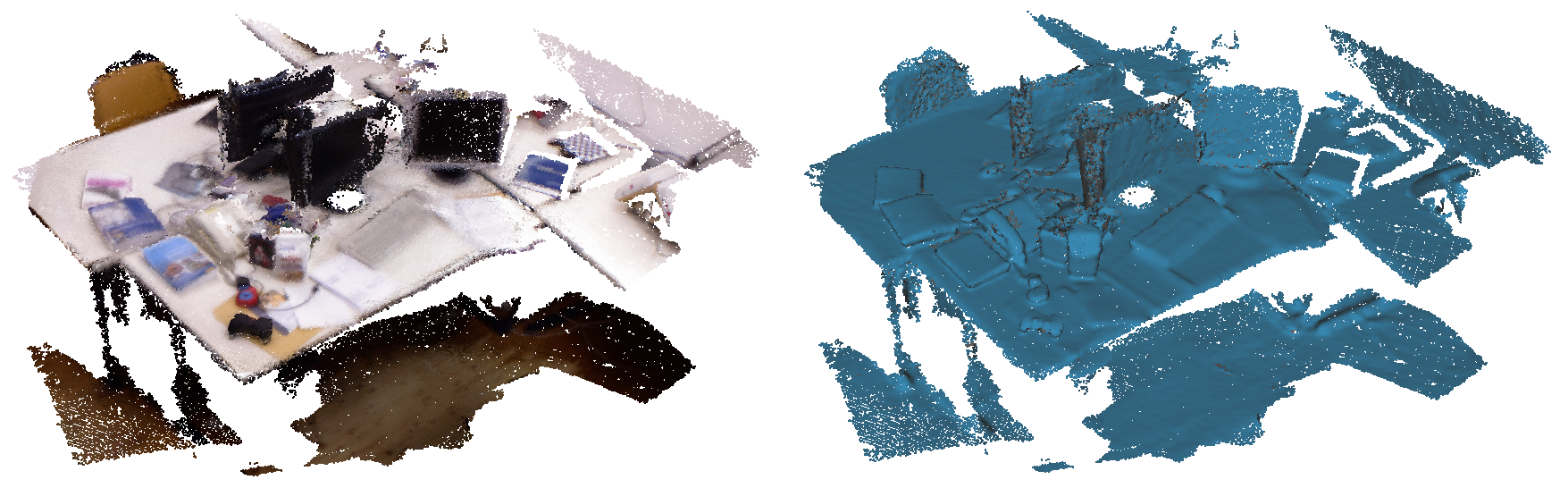
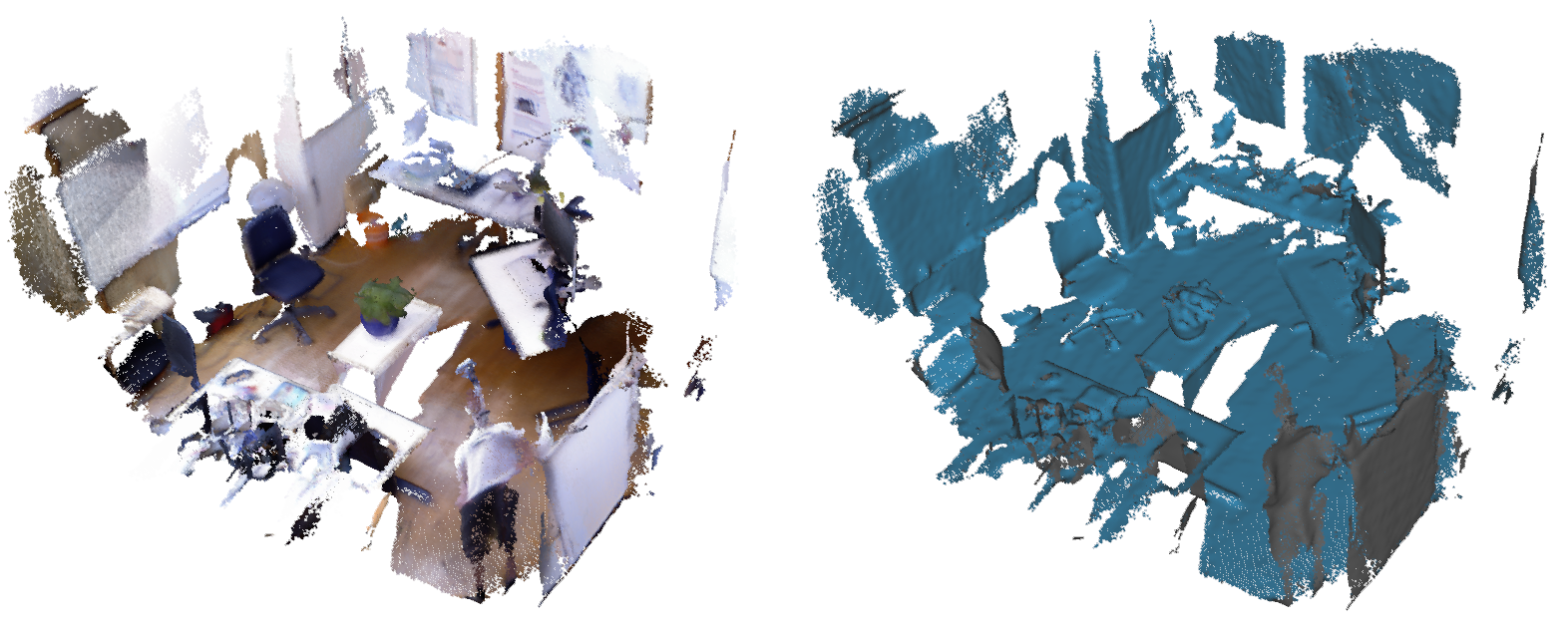
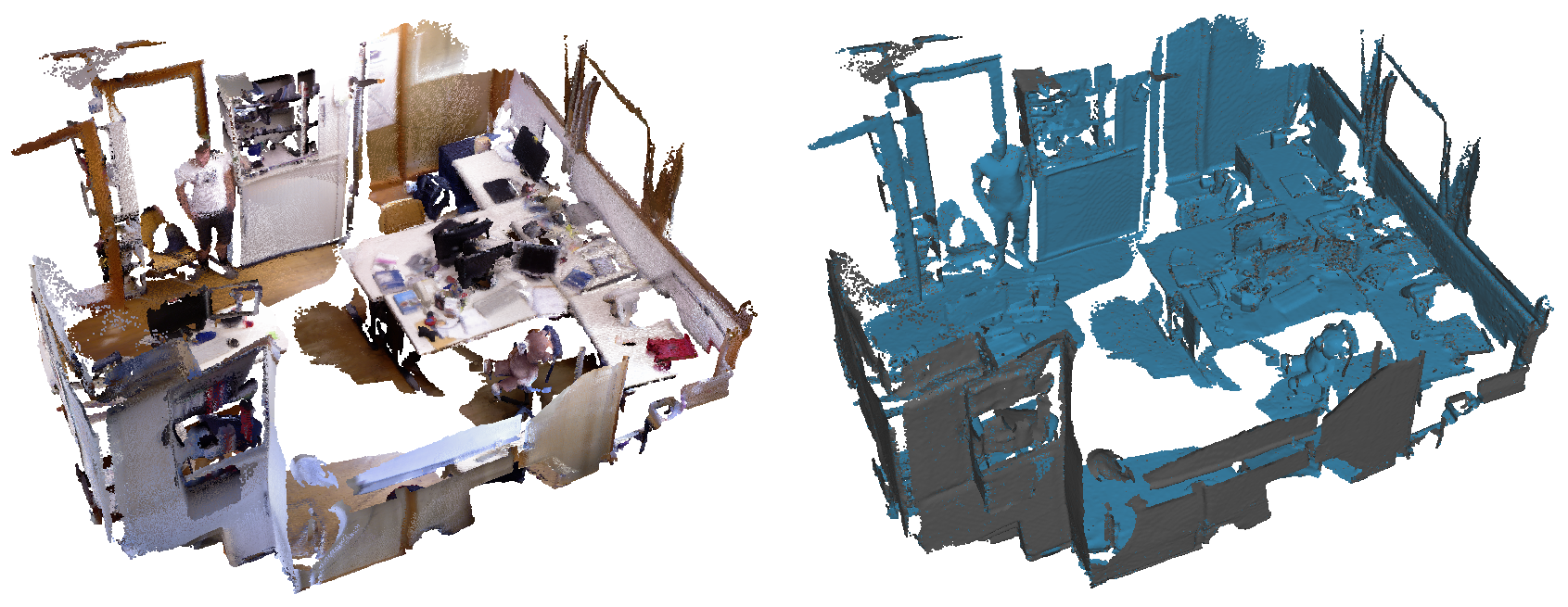


- 左图:深度视频配准融合 + 网格重建;右图:带纹理的三维网格。(OBJ格式的纹理贴图网格)
- 带纹理的网格简化:有些应用场景不需要稠密的网格,需要对网格进行简化,如下图所示。由于网格简化不会影响图片的分辨率,下左图与上面的稠密网格比较,视觉上的色彩是差不多的。
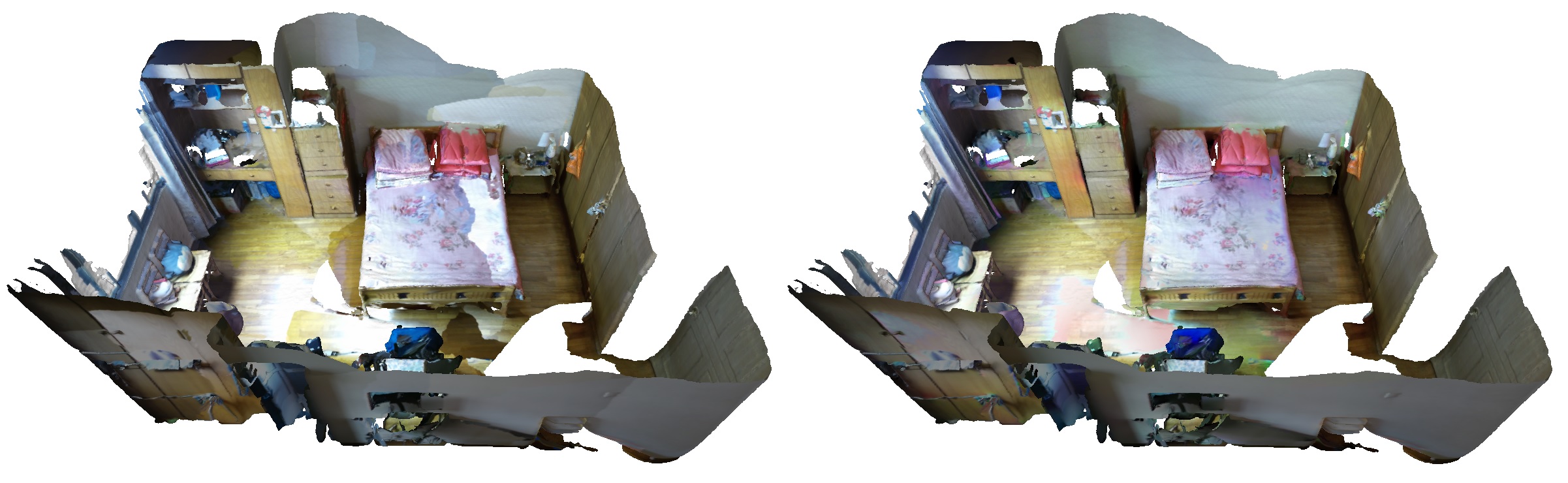
- 纹理色彩融合:原始采集的图片,由于光照环境的影响,往往带有色差。如下左图所示,用原始图片做纹理贴图,在不同图片接缝处,有明显的色差痕迹。纹理色彩融合可以提升纹理贴图整体的色彩融合度,如下右图所示。

如果您有任何疑问和建议,欢迎发email
