点云处理模块
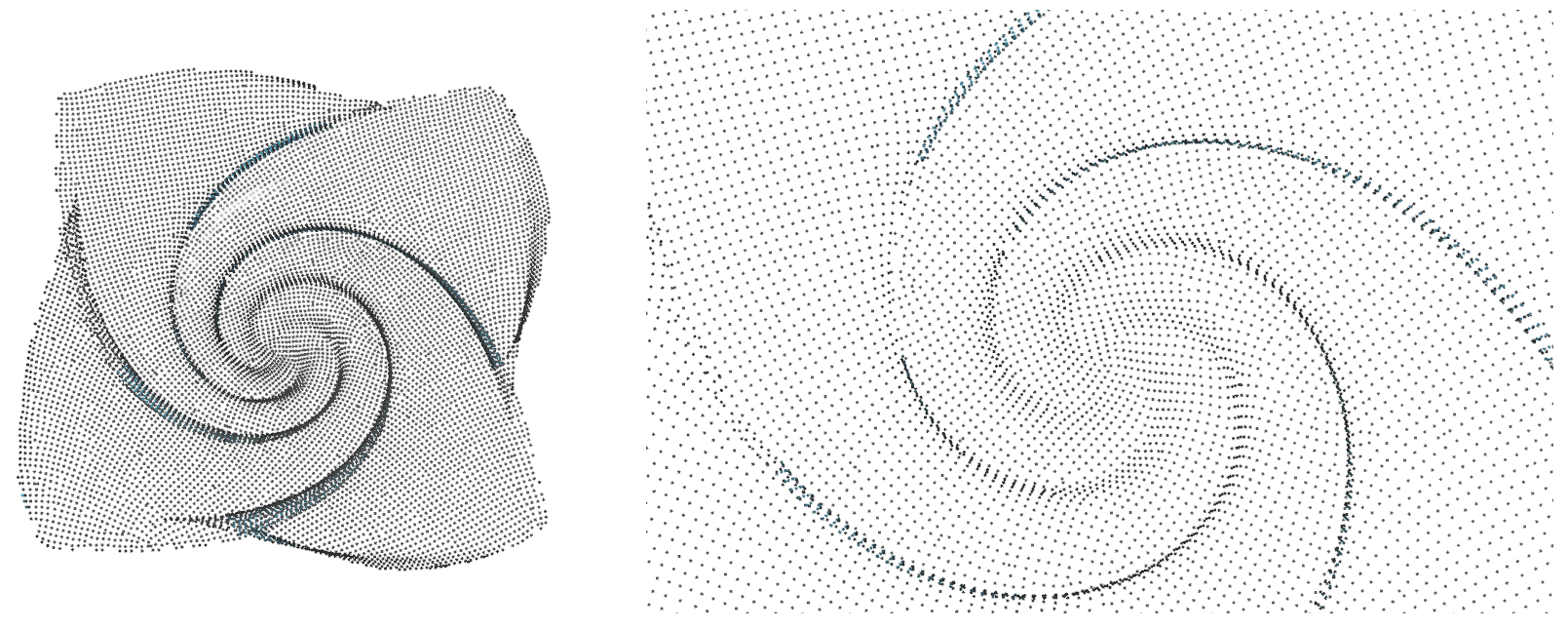
采样
对点云进行采样/降采样。采样不改变点的坐标,只选取一部分点来代表整个点云。通过下拉框切换六种策略:
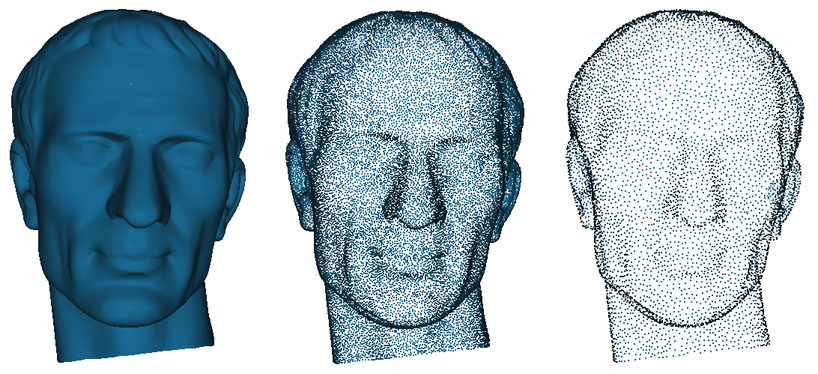
几何对齐采样的例子
法线
点云法线广泛应用于三维数据处理,包含计算、编辑和滤波三个方面:
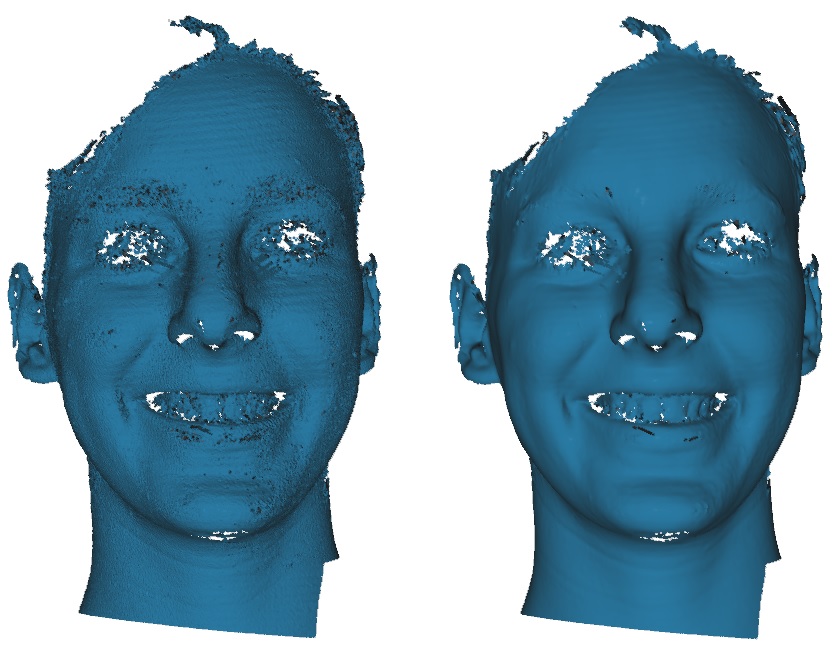
去噪
对点云进行去噪处理,包含孤立块去除、飞点去除和几何平滑三类操作:
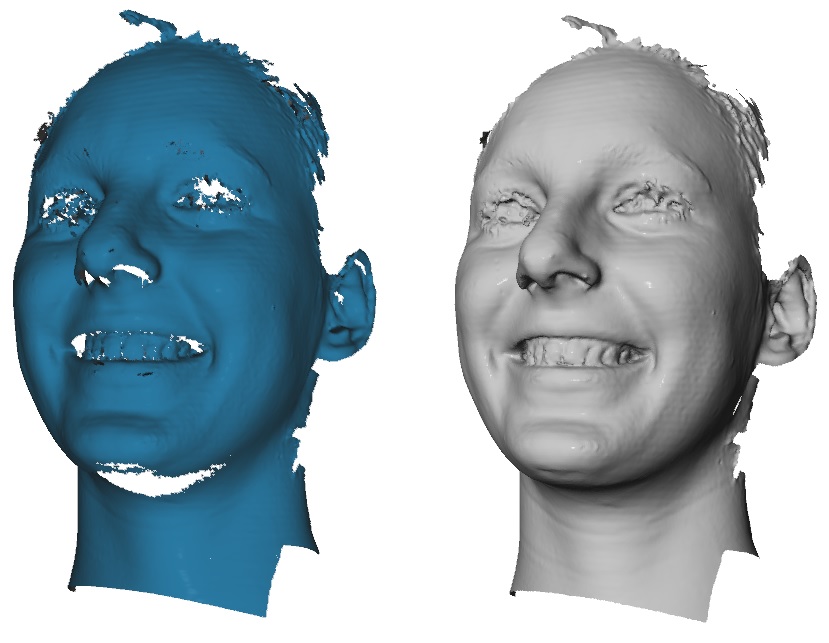
重建三角网格
从点云重建三角网格,通过下拉框切换两种方法:
下面是一些用拟合方法重建的网格例子:

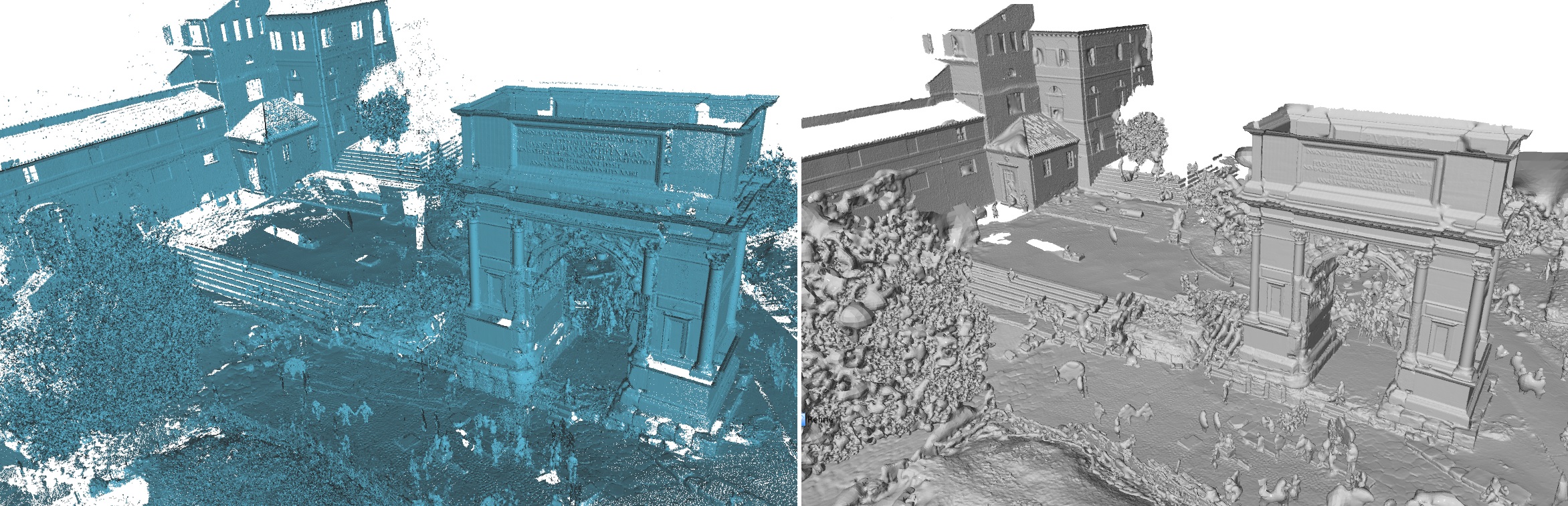
ETH_PRS_TLS Arch 拟合重建结果
下面是用三角化方法重建的例子:
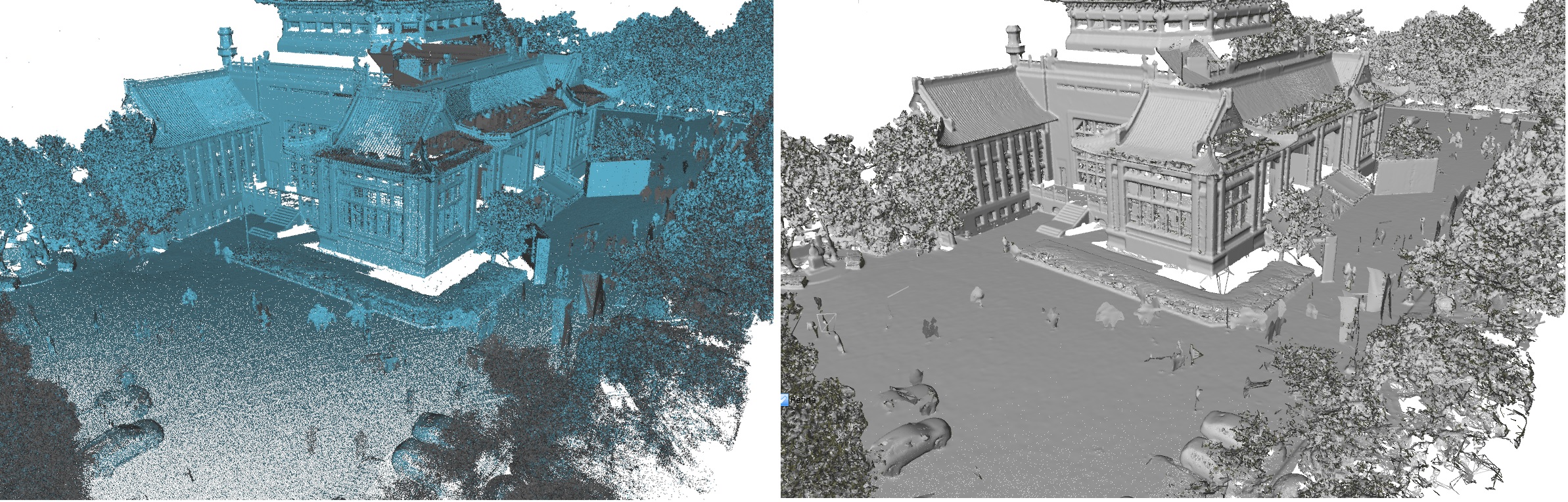
WHU-TLS HeritageBuilding 三角化重建结果
重建四边形网格
从点云直接生成四边形网格,通过下拉框切换两种方法:
如果您有任何疑问和建议,欢迎发email:
